I det här inlägget undersöker vi de tekniska specifikationerna och pinout-detaljerna för IC L293, som är en mångsidig fyr-halv-H-förar-IC, och kan användas för att implementera många intressanta motorer. förarbaserad krets applikationer, till exempel för drift av motorer, solenoider och andra induktiva belastningar (4 enheter separat eller parvis genom push-pull-läge).
Hur det fungerar
IC L293 innehåller i grunden två par utgångar som kan användas oberoende för att manövrera två separata laster i ett push-pull-läge eller på ett dubbelriktat sätt, även kallat totempolsläge. Alternativt kan dessa par utgångspar vara individuellt används för att styra 4 individuella laster på ett enkelriktat sätt.
Ovanstående funktioner för lasterna styrs genom motsvarande ingångsuttag, utlöses från en extern oscillatorkrets eller a PWM-källa .
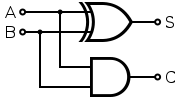
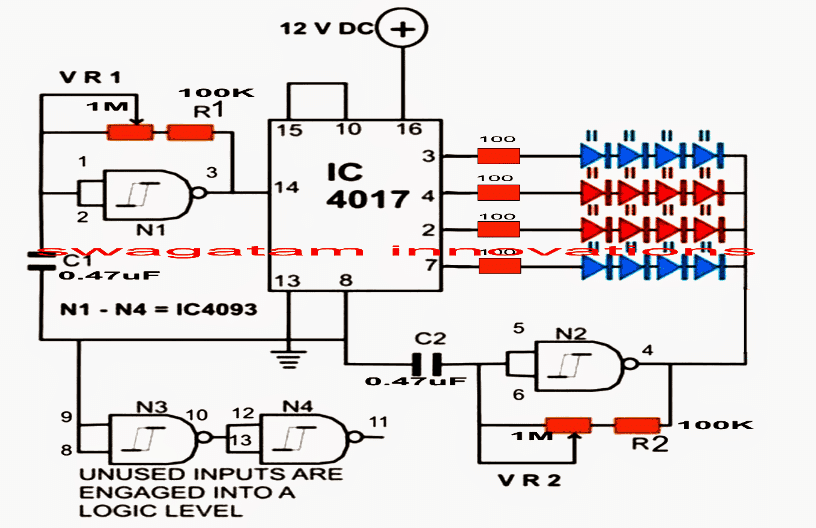
Till exempel om belastningen måste drivas på ett totempolsmönster, kan motsvarande ingångar från de två drivstegen hos IC utlösas från en extern oscillator som genom ett par NAND-grindar , varvid en grind kan anslutas som en oscillator medan den andra som en inverterare.
De två antifassignalerna från dessa NAND-grindar kan sedan anslutas till ingångarna på L293 för att driva relevanta utgångar på ett totempol (push-pull) sätt, vilket i sin tur skulle köra den anslutna belastningen på samma sätt.
Pinouts-tilldelning av IC L293
Låt oss nu lära oss pinout-funktionerna för IC L293 genom att hänvisa till följande diagram och från följande förklaring:

Stift nr 2 är kontrollingången, som styr utgångsstiftet 3.
På samma sätt är stift nr 7 styringången för utgångsstiftet 6.
Pin nr 1 används för att antingen aktivera eller inaktivera ovanstående uppsättningar pinouts. En positiv vid stift nr 1 håller ovanstående uppsättningar av pinouts aktiverade och aktiva, medan en negativ eller 0V-matning inaktiverar dem omedelbart.
Helt identiskt blir stift nr 15 och stift nr 10 kontrollingångarna för motsvarande stift nr 14 och stift nr 11, och dessa förblir i drift så länge stift nr 9 hålls vid positiv logik och inaktiveras när en 0V-logik är tillämpas på denna pinout.
Som tidigare förklarats kan stift nr 3 och stift nr 6 användas som totempolspar genom att mata en antifaslogisk signal på deras ingångsstift # 7 och stift nr 2. Det betyder att när stift nr 2 matas med en positiv logik, måste stift nr 7 ha en negativ logik och vice versa.
Detta gör att utgångarna stift # 6 och stift # 3 kan driva den anslutna belastningen i motsvarande riktning, och omvänt när ingångssignalerna är omvända, omvändes också belastningspolariteten och den börjar rotera i motsatt riktning.
Om denna sekvens snabbt växlas, arbetar lasten på motsvarande sätt fram och tillbaka eller på ett tryckdragande sätt.
Ovanstående operation kan också replikeras över det andra sidoparet av drivrutiner.
Vcc eller de positiva ingångarna för IC är konfigurerade oberoende för två olika matningsingångar.
Stift nr 16, (Vcc1) används för att driva aktiveringsutgångarna och för att driva andra interna logiska steg i IC, och detta kan förses med en ingång på 5 V, även om maximal begränsning är 36 V
Stift # 8, (Vcc2) används specifikt för att driva motorerna, och detta kan matas med allt från 4,5V till 36V
Elektrisk specifikation av IC L293
IC L293 är konstruerad för att fungera med valfri matning mellan 4,5V och 36V, med en maximal strömhanteringsspecifikation på högst 1 amp (2 Amp i pulsläge, max 5ms)
Därför kan vilken belastning som helst inom ovannämnda specifikationer drivas över de diskuterade utgångarna på IC L293.
Ingångskontrolllogiken bör inte överskridas över 7V, vare sig som en kontinuerlig matning eller PWM-matning.
Använd L293 IC för applikation för motorstyrning
Låt oss nu lära oss hur man implementerar motorstyrkretsar med hjälp av IC L293 genom olika driftsätt och genom att använda så många som 4 motorer med separat styranläggning.
I vårt tidigare inlägg studerade vi pinout och funktionsdetaljer för IC L293, här lär vi oss hur samma IC kan användas för att styra motorer genom specifika lägen och konfigurationer.
Kontrolllägen
IC L293 kan användas för att styra motorer i följande lägen:
1) 4 motorer via oberoende PWM-ingångar.
2) 2 Motorer i dubbelriktat läge eller totempolsläge med hastighetskontroll genom PWM
3) En 2-fas BLDC-motor med PWM-ingång
Bilden nedan visar hur IC kan användas för att styra motorer med oberoende kontroller, och hur en enda motor kan användas för att uppnå en dubbelriktad kontroll :

Den vänstra sidan av IC visar en motor som är konfigurerad att fungera i dubbelriktat läge. För att säkerställa att motorn snurrar i en av de valda riktningarna måste stift nr 1 och stift nr 7 appliceras med en antifas 5V DC-ingång. För att ändra motorrotationsriktningen kan denna 5V-polaritet ändras över de nämnda ingångsuttagen.
Stift nr 1 måste hållas på logik högt för att hålla motorn och IC-funktionen aktiverad, en logik 0 här kommer omedelbart att stoppa motorn.
Tillförseln vid styringångens pinouts kan vara i form av en PWM, detta kan dessutom användas för kontroll av motorns hastighet från 0 till maximalt helt enkelt genom att variera PWM-arbetscykeln.
Den högra sidan av IC visar ett arrangemang där ett par motorer styrs oberoende genom oberoende PWM-ingångar vid respektive stift # 15 och stift # 10.
Stift nr 9 måste hållas logiskt högt för att motorn och IC ska fungera. En logisk nolla vid denna pinout kommer omedelbart att stoppa och inaktivera funktionen hos de anslutna motorerna.
Eftersom vänster och höger sidosektioner av IC är identiska med deras detaljerade funktionsdetaljer, kan det visade arrangemanget av motorerna bytas över relevanta pinouts för att uppnå identisk funktion som förklarats ovan, vilket innebär att två individuella motorer kan anslutas vid vänster sida av IC exakt som implementerad till höger om IC i diagrammet.
På samma sätt kan det dubbelriktade systemet införlivas på höger sida av IC-uttagen exakt som uppnåtts på vänster sida av IC i det ovan visade diagrammet.
Ovanstående exempel visar hur IC L293 kan användas för att styra 4 motorer individuellt, eller 2 motorer i dubbelriktat läge, och hur hastigheten också kan styras med en PWM-matning vid relevanta ingångsuttag på IC.
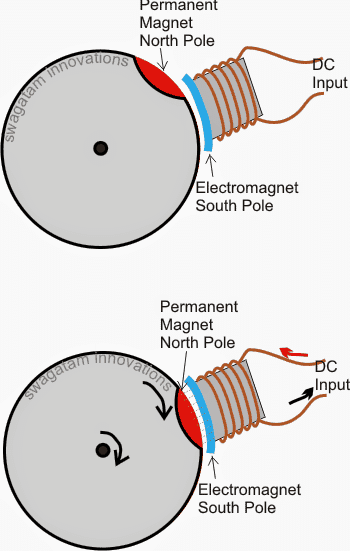
Använd L293 för att styra en 2-fas BLDC-motor

I bilden ovan kan vi se hur IC L293 kan konfigureras för att styra en 2-fas BLDC-motor med de angivna uttagen och genom ett par styringångar som visas som styr A och styr B.
En enda 2-fasmotor kan ses ansluten över IC-utgångarna, medan ingångarna är anslutna med en uppsättning INTE-grindar som blir ansvariga för att skapa den nödvändiga antifasingångslogiken för motorstyrningen.
Kontroll A- och kontroll B-punkter kan utsättas för en alternerande logik för att möjliggöra för 2-fasmotorn att rotera korrekt.
Polariteten hos den växlande logiken bestämmer motorns rotationsriktning.
För att uppnå en linjär hastighetsreglering på motorn kan en PWM-form av logik implementeras över kontroll A och styr B-ingångarna och dess arbetscykel kan varieras för att uppnå önskad hastighetsreglering på den anslutna motorn.
Om du är osäker på de tekniska specifikationerna, databladet eller informationen om IC: n kan du alltid kommentera nedan för omedelbara svar.
Tidigare: Trådlös termometer med 433 MHz RF-länk med Arduino Nästa: Universal ESC-krets för BLDC- och generatormotorer