En krets som gör det möjligt för en användare att linjärt styra hastigheten hos en ansluten motor genom att rotera en ansluten potentiometer kallas en motorvarvtalsreglerkrets.
Här presenteras 3 enkelt byggda hastighetskontrollkretsar för likströmsmotorer, en med MOSFET IRF540, en andra med IC 555 och den tredje konceptet med IC 556 med momentbehandling.
Design nr 1: Mosfet-baserad DC Motor Speed Controller
En mycket cool och enkel likströmsmotorhastighetsreglerkrets kan byggas med bara en enda mosfet, ett motstånd och en kruka, som visas nedan:

Använda en BJT Emitter Follower

Som kan ses är mosfet riggad som en källföljare eller ett gemensamt dräneringsläge, för att lära dig mer om den här konfigurationen kan du hänvisa till det här inlägget , som diskuterar en BJT-version, ändå förblir arbetsprincipen densamma.
I ovanstående DC-motorstyrningsutformning skapar potten justering en varierande potentialdifferens över mosfets grind, och mosfets källstift följer helt enkelt värdet på denna potentialdifferens och justerar spänningen över motorn därefter.
Det antyder att källan alltid kommer att ligga 4 eller 5V bakom grindspänningen och variera upp / ner med denna skillnad, vilket visar en varierande spänning mellan 2V och 7V över motorn.
När grindspänningen är cirka 7V kommer källstiftet att leverera minsta 2V till motorn vilket orsakar en mycket långsam centrifugering på motorn, och 7V kommer att finnas tillgänglig över källstiftet när potten justerar genererar hela 12V över porten på mosfet.
Här kan vi tydligt se att Mosfet-källstiftet verkar 'följa' grinden och därmed namnet källföljaren.
Detta händer eftersom skillnaden mellan porten och källstiftet på mosfet alltid måste vara runt 5V, för att mosfet ska kunna leda optimalt.
Hur som helst, ovanstående konfiguration hjälper till att genomföra en smidig hastighetskontroll på motorn, och designen kan byggas ganska billigt.
En BJT kan också användas istället för mosfet, och i själva verket skulle en BJT producera ett högre kontrollområde på cirka 1V till 12V över motorn.
Videodemo
https://youtu.be/W762NTuQ19gNär det gäller att styra motorhastigheten enhetligt och effektivt blir en PWM-baserad styrenhet det idealiska alternativet, här lär vi oss mer om en enkel krets för att genomföra denna operation.
Design # 2: PWM DC Motor Control med IC 555
Utformningen av en enkel motorvarvtalsregulator som använder PWM kan förstås på följande sätt:
Ursprungligen när kretsen drivs är avtryckarstiftet i ett logiskt lågt läge eftersom kondensatorn Cl inte är laddad.
Ovanstående villkor initierar svängningscykeln, vilket gör att utgången ändras till en logik hög.
En hög effekt tvingar nu kondensatorn att ladda via D2.
När du når en spänningsnivå som är 2/3 av matningen, stift nr 6 som är tröskeln för IC-utlösarna.
Det ögonblick som stift nr 6 utlöses, stift nr 3 och stift nr 7 återgår till låg logik.
När stift nr 3 är lågt börjar C1 ännu en gång urladdas via D1, och när spänningen över C1 faller under den nivå som är 1/3 av matningsspänningen blir stift nr 3 och stift nr 7 igen höga, vilket får cykeln att följa och fortsätt upprepa.
Det är intressant att notera att C1 har två diskret inställda banor för laddning och urladdning via dioderna D1, D2 respektive genom motståndsarmarna som ställts in av potten.
Det betyder att summan av motstånd som C1 stöter på under laddning och urladdning förblir densamma oavsett hur potten är inställd, därför är våglängden för den utlagda pulsen alltid densamma.
Eftersom laddnings- eller urladdningsperioderna beror på det motståndsvärde som påträffas i deras banor, ställer emellertid potten diskret dessa tidsperioder enligt dess justeringar.
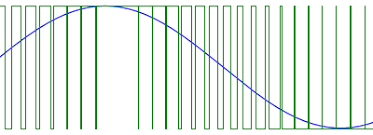
Eftersom laddnings- och urladdningstidsperioderna är direkt kopplade till utmatningscykeln, varierar det beroende på justeringen av potten, vilket ger de avsedda varierande PWM-pulserna vid utgången form.
Det genomsnittliga resultatet av förhållandet mellan markering och utrymme ger upphov till PWM-utgången som i sin tur styr motorns DC-hastighet.
PWM-pulserna matas till grinden till en mosfet som reagerar och styr den anslutna motorströmmen som svar på inställningen av potten.
Den aktuella nivån genom motorn bestämmer hastigheten och implementerar därmed den styrande effekten via potten.
Frekvensen för utsignalen från IC kan beräknas med formeln:
F = 1,44 (VR1 * C1)
Mosfet kan väljas enligt kravet eller lastströmmen.
Kretsschemat för den föreslagna likströmsmotorhastighetsregulatorn kan ses nedan:

Prototyp:

Bevis för videotestning:
https://youtu.be/M-F7MWcSiFYI videoklippet ovan kan vi se hur den IC 555-baserade designen används för att styra en DC-motorhastighet. Som du kan bevittna, även om glödlampan fungerar perfekt som svar på PWM: erna och varierar dess intensitet från minsta glöd till maximalt låg, så gör inte motorn det.
Motorn svarar initialt inte på de smala PWM: arna, utan börjar med en ryck efter att PWM: erna har justerats till betydligt högre pulsbredder.
Detta betyder inte att kretsen har problem, det beror på att likströmsmotorarmaturen hålls tätt mellan ett par magneter. För att starta en start måste ankaret hoppa sin rotation över magnetens två poler, vilket inte kan hända med en långsam och mild rörelse. Det måste inledas med en dragkraft.
Det är exakt varför motorn initialt kräver högre justeringar för PWM och när rotationen initieras får ankaret viss kinetisk energi och nu blir det möjligt att uppnå långsammare hastighet genom smalare PWM.
Men ändå kan det vara omöjligt att få rotationen till en knappt rörlig långsam status på grund av samma anledning som förklarats ovan.
Jag försökte mitt bästa för att förbättra svaret och uppnå en långsammast möjlig PWM-kontroll genom att göra några modifieringar i det första diagrammet som visas nedan:

Med detta sagt kan motorn visa bättre kontroll på de långsammare nivåerna om motorn är fäst eller fastspänd med en last genom växlar eller remskivsystem.
Detta kan hända eftersom lasten fungerar som ett spjäll och hjälper till att ge en kontrollerad rörelse under de långsammare hastighetsjusteringarna.
Design # 3: Använda IC 556 för förbättrad hastighetskontroll
Varierar en likströmsmotorhastighet kan tyckas vara inte så svårt och du kan hitta massor av kretsar för det.
Dessa kretsar garanterar emellertid inte jämna vridmomentnivåer vid lägre motorhastigheter, vilket gör funktionen ganska ineffektiv.
Vidare vid mycket låga hastigheter på grund av otillräckligt vridmoment tenderar motorn att stanna.
En annan allvarlig nackdel är att det inte finns någon motoråterföringsfunktion som ingår i dessa kretsar.
Den föreslagna kretsen är helt fri från ovanstående brister och kan generera och upprätthålla höga vridmomentnivåer även vid lägsta möjliga hastigheter.
Kretsdrift
Innan vi diskuterar den föreslagna PWM-motorstyrkretsen vill vi också lära oss det enklare alternativet som inte är så effektivt. Ändå kan det anses rimligt bra så länge belastningen över motorn inte är hög och så länge hastigheten inte sänks till miniminivåer.
Figuren visar hur en enda 556 IC kan användas för att styra en ansluten motorhastighet, vi kommer inte att gå in i detaljerna, den enda anmärkningsvärda nackdelen med denna konfiguration är att vridmomentet är direkt proportionellt mot motorns hastighet.
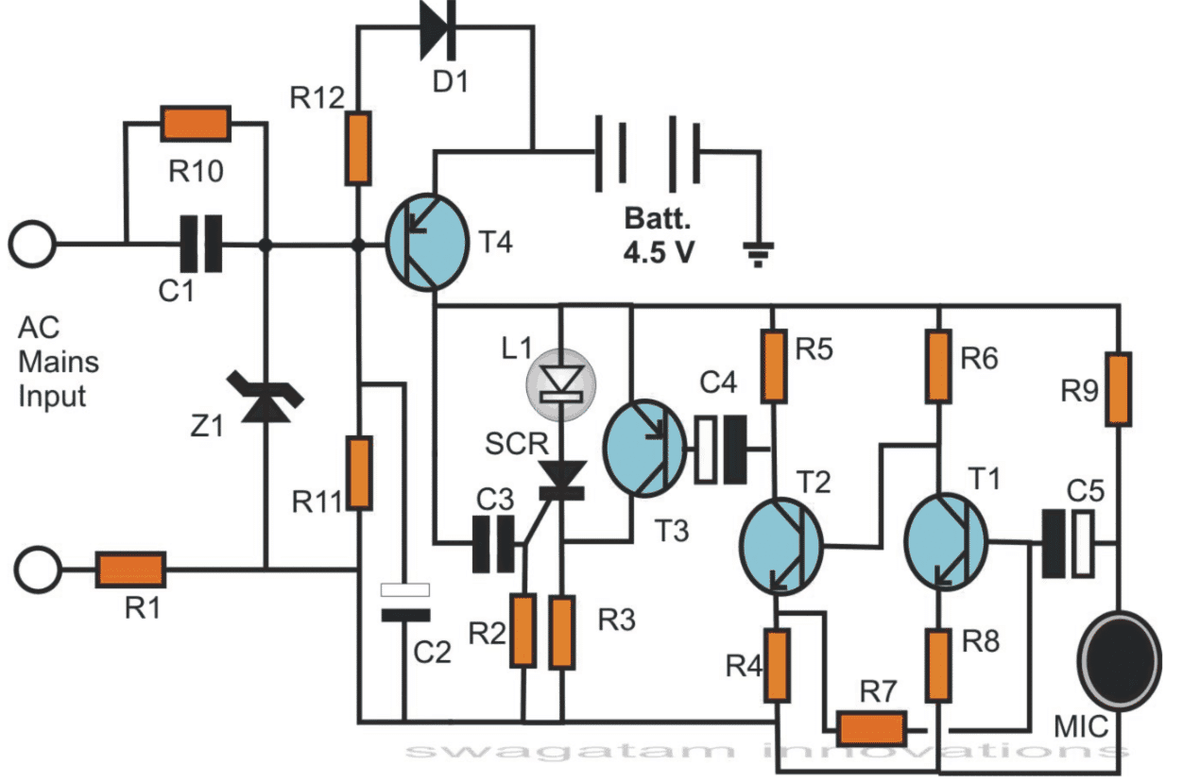
Kommer vi tillbaka till den föreslagna kretskonstruktionen med högt vridmomentstyrning, här har vi använt två 555 IC istället för en eller snarare en enda IC 556 som innehåller två 555 IC i ett paket.
Kretsschema

Huvuddrag
Kortfattat det föreslagna DC-motorstyrenhet innehåller följande intressanta funktioner:
Hastigheten kan varieras kontinuerligt från noll till max utan att stanna.
Momentet påverkas aldrig av hastighetsnivåerna och förblir konstant även vid minimala hastighetsnivåer.
Motorns rotation kan vändas eller vändas inom en bråkdel av en sekund.
Hastigheten är variabel i båda riktningarna för motorns rotation.
De två 555 IC tilldelas två separata funktioner. En sektion konfigureras som en hållbar multivibrator som genererar 100 Hz fyrkantvågsklockor som matas till föregående 555 sektion inuti förpackningen.
Ovanstående frekvens är ansvarig för att bestämma frekvensen för PWM.
Transistorn BC 557 används som en konstant strömkälla som håller den angränsande kondensatorn vid sin samlararm laddad.
Detta utvecklar en sågtandspänning över ovanstående kondensator, som jämförs inuti 556 IC med provspänningen applicerad externt över den visade uttaget.
Provspänningen gäller externt kan härledas från en enkel 0-12V strömförsörjningskrets med variabel spänning.
Denna varierande spänning applicerad på 556 IC används för att variera PWM för pulserna vid utgången och som så småningom används för hastighetsreglering av den anslutna motorn.
Strömställaren S1 används för att omedelbart vända motorriktningen vid behov.
Dellista
- R1, R2, R6 = 1K,
- R3 = 150K,
- R4, R5 = 150 ohm,
- R7, R8, R9, R10 = 470 ohm,
- Cl = 0,1 uF,
- C2, C3 = 0,01 uF,
- C4 = 1uF / 25VT1,
- T2 = TIP122,
- T3, T4 = TIP127
- T5 = BC557,
- T6, T7 = BC547,
- D1 --- D4 = 1N5408,
- Z1 = 4V7 400mW
- IC1 = 556,
- S1 = SPDT vippomkopplare
Ovanstående krets inspirerades av följande motorförarkrets som publicerades långt tillbaka i elecktor electronic India magazine.
Kontroll av vridmoment med hjälp av IC 555

Det första motorstyrningsdiagrammet kan förenklas mycket genom att använda en DPDT-omkopplare för motoromkoppling och genom att använda en emitterföljertransistor för hastighetsreglering, som visas nedan:

Precision Motor Control med en enda op-förstärkare
En extremt raffinerad eller invecklad kontroll av en likström motorn kan uppnås med hjälp av en op-amp och en tacho-generator. Op-amp är riggad som en spänningskänslig switch. I kretsen som visas nedan, så snart utgången från färdgeneratorn är lägre än den förinställda referensspänningen, slås omkopplingstransistorn PÅ och 100% effekt kommer att ges till motorn.
Omkopplarens effektförstärkare skulle hända på bara några millivolt runt referensspänningen. Du behöver en dubbel strömförsörjning, som kanske bara är zenerstabiliserad.

Denna motorstyrenhet möjliggör steglöst justerbar räckvidd utan att involvera någon form av mekaniska krångel.
Op amp-utgången är bara +/- 10% av matningsskenornas nivå, och därmed använder en dubbel emitterföljare enorma motorhastigheter kan kontrolleras.
Referensspänningen kunde fixeras genom termistorer, eller en LDR etc. Den experimentella inställningen som anges i kretsschemat använde en RCA 3047A op amp, och en 0,25 W 6V motor som färdgenerator som genererade runt 4V vid 13000 rpm för den avsedda återkopplingen.
Tidigare: 3 bästa Joule Thief Circuits Nästa: Tryckkokare Whistle Counter Circuit