I denna del av artikeln lär vi oss om en innovativ metod för att omvandla pedalpressmekanismen i elektriska fordon till en motsvarande varierande elsignal, som kan användas vidare för att bearbeta fordonets hastighetskontroll.
Det förklarade konceptet fungerar som en elektronisk accelerator, vilket ökar fordonshastigheten linjärt när pedalen gradvis trycks in, och vice versa, med PWM-teknik
Idén begärdes av Mr.Lokesh Maini
Tekniska specifikationer
Jag är en mekanisk kille, arbetar för närvarande på ett elfordon och jag vill styra hastigheten på min motor med pedalen. Jag får inte en kontroller för min motor, snälla hjälp mig att bygga min egen, jag kommer att vara mycket
tacksam
Motorspecifikationer är 36 volt, 43 lampor och 1,5 hk borstad likströmsmotor.
Den mekaniska designen
En elektronisk version av en pedalaccelerator kommer i första hand att kräva en mekanism för att först omvandla mekanisk pressning av pedalen till en motsvarande varierande elektrisk signal, så att denna signal kan bearbetas genom ett signalprocessorsteg för den önskade omvandlingen till en praktisk hastighetskontroll av fordon.
Många begrepp kan provas, till exempel genom att använda en piezo-belastningssensor, en kapacitiv belastningssensor, av en resonanssensor etc. I den här artikeln lär vi oss en mycket enklare metod som jag har tagit fram som innehåller en LED / LDR-enhet för att uppnå samma .

I det elektromekaniska arrangemanget som visas i figuren ovan kan vi se följande integrerade komponenter:
Ett litet redskap fäst med en skruvmekanism.
Skruvhuvudet har en vit mattreflektoryta
En LED / LDR-enhet placerad framför skruvhuvudet.
Hur den föreslagna mekanismen fungerar.
Kugghjulet som visas i figuren ovan ska låsas med ett annat kugghjul med ett förhållande som kan vara 10 gånger högre än detta kugghjul.
Den större växeln måste konfigureras med pedalmekanismen så att den initierar en rotationsrörelse som svar på att pedalen trycks in.
Rotationssvaret från kugghjulen kommer i sin tur att producera en skruvhuvud framåt över kammaren där LED / LDR-enheten är placerad.
Processen kommer att få en proportionerligt varierande mängd reflekterat ljus från lysdioden att tas emot av LDR.
Denna varierande data (i form av ett varierande motstånd) som motsvarar pedalfördjupningen kan sedan matas till en signalprocessorkrets för att tvinga den avsedda hastighetskontrollen för det specifika fordonet.
I nästa inlägg vi lär oss signalprocessorn med hjälp av PWM-teknik.
I ovan avsnitt vi lärde oss om en enkel elektromekanisk omvandlare för att omvandla pedalåtgärden till en proportionellt varierande elektrisk signal.
Konvertera pedalåtgärd till PWM
Låt oss nu studera en kretsimplementering som gör det möjligt för oss att omvandla pedalens elektriska signal till en motsvarande varierande PWM-signal för den avsedda motorhastighetskontrollen av fordonet.

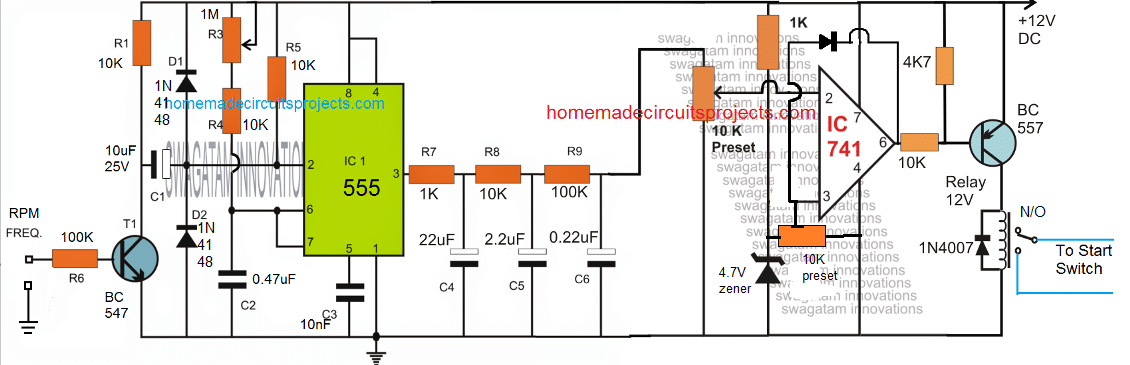
Med hänvisning till ovanstående kretsschema kan vi bedöma kretsfunktionen med hjälp av följande punkter:
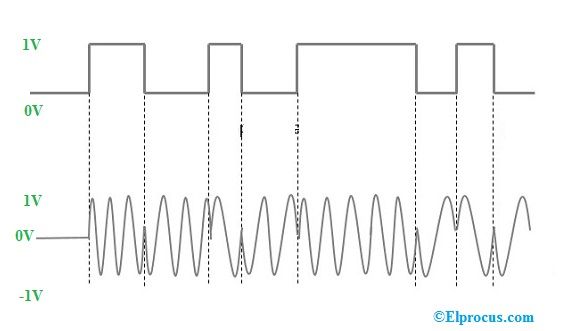
IC1 är konfigurerad som en 80Hz-pulsgenerator med maximal PÅ-tid och minsta AV-tid som dess arbetscykel
IC2 är riggad som en komparator som först omvandlar ovanstående 80Hz-puls applicerad på sin pin2 med triangelvågor genererade vid dess pin6 och jämför triangelvågorna med den modulerande spänningen som finns tillgänglig vid dess pin5.
Pin5-moduleringsspänningen härrör från en BJT BC547-sändare som är konfigurerad som en gemensam kollektor med sin bas ansluten till LDR-ingångarna uppnådda från pedalåtgärderna.
De olika motstånden som svar på pedalpressningen jämförs med 100K-förinställd inställning och en proportionell spänningsstorlek utvecklas vid basen av transistorn som omvandlar lågströmsingången till en ekvivalent högströmssignal över pin5 på IC2.
Denna momentana potentialnivå accepteras och bearbetas av IC2 som genererar proportionell storlek av PWM-signaler för mosfet och den anslutna motorn.
Motorhastigheten regleras och varieras sålunda enligt de fluktuerande PWM: erna som svar på fordonets pedaltryck.
Ovanstående procedurer omvandlar effektivt pedalåtgärderna till en kontrollerad operation av fordonets motor och dess hastighet.
Hur man ställer in kretsen.
Det är väldigt lätt.
- Tryck pedalen så långt det går att skruvhuvudet når närmast möjliga läge framför LED / LDR-enheten.
- Justera sedan 100k-förinställningen tills pin3 på IC2 börjar generera PWM med maximal bredd, detta kan bekräftas genom att mäta spänningen vid pin3 så nära kretsens matningsspänning som möjligt, det vill säga 5V.
- När detta är klart kan installationsproceduren antas vara fullständig.
- Resultaten kunde nu verifieras genom att trycka på pedalen på olika nivåer och kontrollera motorvarvtalet på samma sätt.
Tidigare: Enkel ESR-mätarkrets Nästa: Hur man bygger en Grow Light Circuit