Robotar kan användas i många applikationer inom industrier, militära, inhemska. En av de viktigaste användningarna av robotar är en tillgång för människor. Oavsett om det är någon form av farliga situationer som en brand som bryter ut eller en plats full av landminor, kan robotar enkelt hitta en väg ut ur dessa problem. Så låt oss se dessa två typer av robotar - En landminnesrobot och en brandbekämpningsrobot
Land Mine Sensing Robot
Hur kan jag känna landgruva med robotar?
En av de viktigaste tillämpningarna av Robotics är i försvar. En robot i militären är ett fjärrstyrt fordon med många unika funktioner. Det kan vara ett robotfordon med en kamera att spionera, ett robotfordon med en LASER-pistol för att upptäcka och förstöra mål eller en robot med en metalldetektor för att upptäcka förekomsten av landminor.
Ett av de traditionella och konventionella sätten att upptäcka gruvor är användningen av utbildade kontaktannonser som manuellt söker efter metaller eller gruvor med en metalldetektor. Detta är dock osäkert och dyrt och också långsamt.
För att övervinna detta problem föredras ett mycket mer avancerat system.
Ett par sätt att upptäcka landminor:
- Använd en robot som kan sätta in en sond i marken som kan upptäcka föremålen under jorden och bestämma vilken typ av material.
- Använda en robot med en metalldetektor som känner av närvaron av ledande element som landminor och larmar användaren.
Innan vi går vidare in i detaljer om den andra typen - dvs. roboten med en metalldetektor, låt oss få en kort återkallelse av de två viktiga termerna - landminor och metalldetektor.
TILL Land min är en explosiv anordning placerad medvetet under marken som exploderar när den utlöses av tryck. Enligt en statistisk rapport finns det cirka 100 miljoner landminor i 70 länder över hela världen. En landmin som väl har placerats kan arbeta upp till 50 år. Är det inte farligt !!

En grundläggande metalldetektor fungerar på principen om faradays induktionslag. Den består av en spole som får energi för att utveckla ett pulserande magnetfält runt den. När spolen kommer i närheten av ett ledande element som metall (en gruva) induceras en elektrisk ström (virvelström) i den. Den inducerade virvelströmmen orsakar utveckling av det elektromagnetiska fältet runt metallen, som överförs till spolen som utvecklar en elektrisk signal som analyseras. Större är avståndet mellan spolen och metallen, svagare är magnetfältet.
En enkel prototyp:

En enkel prototyp av robotfordon med metalldetektor
Designa roboten:
Robotfordonet består av följande enheter:
- En rektangulär bas för att stödja hela robotstrukturen, fäst med två hjul för rörelse.
- Ett par likströmsmotorer som ger roboten den rörelse som krävs.
- En styrenhet bestående av en RF-mottagare som tar emot kommandosignaler från en sändarenhet för att styra motorföraren och styra motorerna därefter.
- En metalldetektorkrets tillsammans med ett summerlarm utlöses när metallen upptäcks.
Hur fungerar roboten:
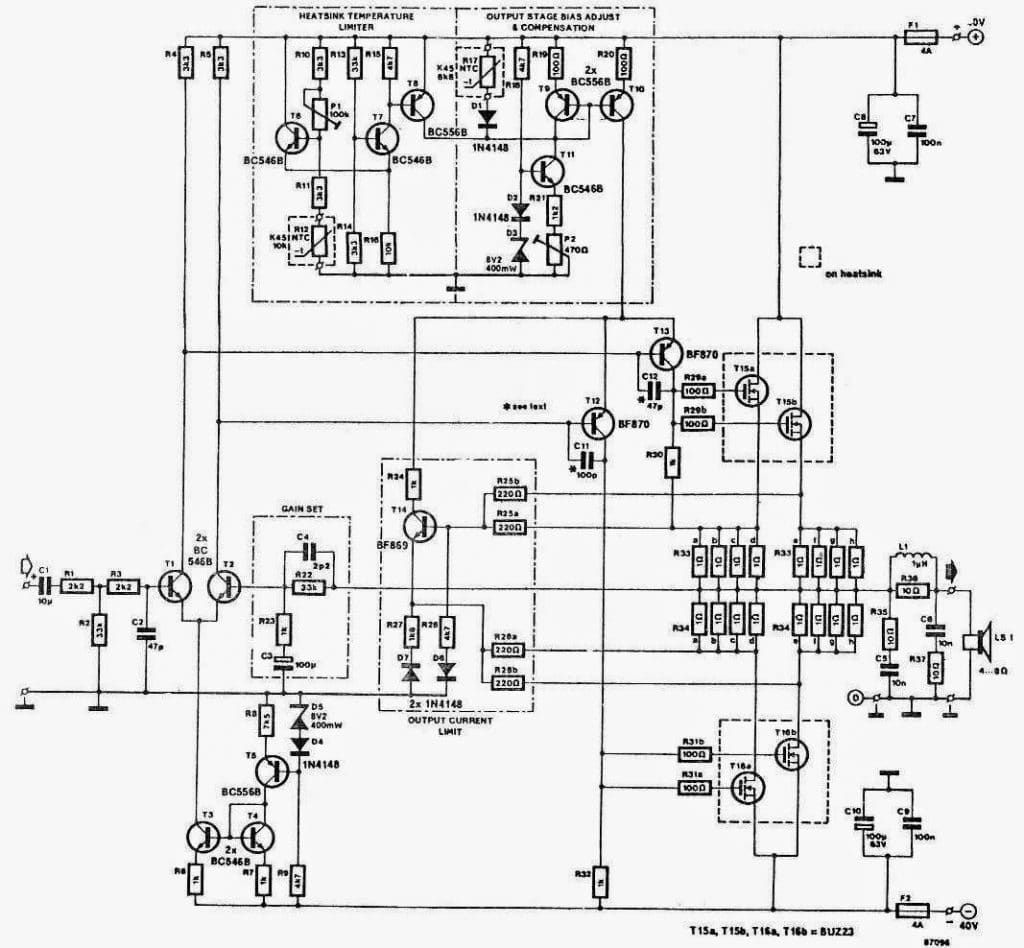
Metaldetektorkretsen inbäddad i robotstyrkretsarna består av en transistor som drivs av en avstämd oscillatorkrets bestående av spolen. När en metall detekteras och den elektriska strömmen överförs igen genom spolen, är transistorn 1 i tillstånd och driver en annan transistor2 till avstängt tillstånd. Denna transistor3 driver i sin tur en annan transistor till avstängt tillstånd. Denna speciella transistor 3 är ansluten till en annan transistor4 som är ansluten så att den är i tillstånd när dess drivartransistor 3 är i från-tillstånd. Transistorn 4 är ansluten så att ljudsignalen och lysdioden i tillstånd får korrekt förspänning och börjar leda.

Blockdiagram över metalldetektorenhet
LED-lampan börjar lysa och summern börjar ringa. När en metall upptäcks kommer alltså summerlarmet att ringa och lysdioden lyser.
Kontrollera roboten:
Den enkla prototypen kan styras med RF-kommunikation, som är ett kortdistanskommunikationssystem. Kommandona överförs med hjälp av en sändare och tas emot av en mottagare inbäddad i robotkretsen för att styra robotrörelsen.

Blockdiagram för sändaravsnittet
Sändaren består av en uppsättning tryckknappar som framåt, bakåt, stopp, vänster och höger som trycks in för att ge robotens rörelse i valfri riktning. Tryckknapparna är anslutna till ingångsporten på mikrokontrollern. Mikrokontrollern vid mottagning av dessa signaler utvecklar en motsvarande 4-bitars signal i parallell form över en annan I / O-port, till vilken en kodare IC är ansluten. Kodaren konverterar dessa signaler till en seriell form av data. RF-sändaren modulerar denna seriella data, som överförs via antennen.

Blockdiagram över mottagarsektionen
Mottagarsektionen monterad på roboten består av RF-mottagaren som demodulerar denna signal. Avkodaren IC tar emot denna signal i serieform och utvecklar en motsvarande 4-bitars parallell data vid dess utgång. Mikrokontrollern tar emot dessa data och ger följaktligen en styrsignal till motorföraren IC LM293D, som driver båda motorerna.
Brandbekämpande robotfordon:
Konceptet av brandbekämpning robotfordon kämpar i en eld. Under de senaste åren har det inträffat flera allvarliga olyckor, inklusive brand och bomber. Vi har känt till stora brandolyckor som kärnkraftverk, petroleum, bensintankar och kemiska fabriker, storskaliga brandindustriföretag på dessa platser en gång startade branden, kan resultatet är mycket allvarligt. Tusentals människor har dött i denna förekomst. Det är en brandbekämpning robotfordon teknologi. Detta robotfordon brukade hitta branden och slåss för bränderna.

Brandbekämpande robotfordon
Arbetsprincip för brandbekämpningsrobotfordon:
Robotfordonet laddas med en vattentankfartyg. Pumpen styrs av trådlös kommunikation (RF- och mobilkommunikation). Sändaränden ansluten till tryckknapparna. Med denna tryckknapp skickas kommandon till mottagaren och styrmomentet för den robotliknande framåt, bakåt, vänster, höger. Den mottagande änden tre motorer är anslutna till mikrokontrollern.

Sändarblockdiagram

Mottagarblockdiagram
RF-sändare fungerar som RF-fjärrkontroll där räckvidden är 200 meter. I hemmet, kontor och industrier förvaras brandsensorerna på vissa ställen när en brand uppstår nära en brandsensor. Sensorerna är en känsla av att motsvarande bit överförs till RF-mottagaren. RF-mottagaren är integrerad med en mikrokontroller. När RF-mottagaren tar emot signalerna om att information skickas till mikrokontrollern rör sig roboten mot brandsensorer. Sensorns platser lagras i mikrokontrollern. När roboten når den önskade platsen stannar roboten och aktiverar sprutan till den elden. Efter avfyringen går roboten till utgångsläget. Hela kretsen styrs av mikrokontrollern.
Typer av brandbekämpningsrobotar:
Hem Brandbekämpning Robotfordon :
Fältåtgärden begränsas av den nuvarande Flore of house. Denna robot använder många hushållsartiklar för att fånga eld när någon sover eller är borta. Denna robot används för att säkra hemmet och med denna applikation öppnas alla dörrar i Flore eftersom detta fordon flyttar en plats till en annan plats i hemmet. Brandbekämpningsområdet måste vara säkert för att inte orsaka en ny olycka. Den ytterligare funktionen hos denna robot är att arbeta på långt avstånd.
Industriell brandbekämpning:
De flesta industrier står inför en brandolycksproblem som gas, bensin, kärnkraftverk, kemiska industrier enorma mängder skador och mer antal människor är döda i närheten av omgivande områden. Denna robot har styrkan att bära eld runt i det brinnande området för att leverera obegränsat med vatten. Brand orsakar sänkt sikt, extrem värme och många fler situationer som kan leda till skador.
Skogsbrandbekämpning:
Skogsbränder är mycket farligt. Det kan vara kort tid att bränna en stor mängd skogsområde. Även stadsbrandvägar måste hantera skogsbränder i området kring staden. För några år tillbaka dödades cirka 152 brandmän på 1990-talet. Skogsbrandrobotiken använder för att fånga eld och slåss i brand. Denna robot använder en extern styrenhet för trådlös kommunikationsändamål. Modulen är ansluten till vars utgång används för skogsbrandsläckning av roboten. Applikationerna som trycksensor, temperatursensor, smogsensor, infraröd sensor används för att styra skogsbrandbekämpningsroboten.
Vid uppmaningen!
Medan jag har gett en grundläggande uppfattning om roboten med en metalldetektor, finns det fortfarande en stor fråga - Hur man styr roboten på ojämna terrängar som är okända, särskilt i miljöer som utsätts för kraftiga regn, damm och heta temperaturområden. För att hitta ett svar och skicka dina kommentarer.