
Definition
En borstlös likströmsmotor består av en rotor i form av en permanentmagnet och stator i form av polyfas ankarlindningar. Den skiljer sig från den konventionella likströmsmotorn på sådant sätt att den inte innehåller borstar och pendlingen sker elektriskt med hjälp av en elektronisk drivenhet för att mata statorlindningarna.
I grund och botten kan en BLDC-motor konstrueras på två sätt - genom att placera rotorn utanför kärnan och lindningarna i kärnan och en annan genom att placera lindningarna utanför kärnan. I det tidigare arrangemanget fungerar rotormagneterna som en isolator och minskar värmeavledningshastigheten från motorn och arbetar vid låg ström. Det används vanligtvis i fans. I det senare arrangemanget släpper motorn ut mer värme, vilket orsakar en ökning av vridmomentet. Den används i hårddiskar.

BLDC
4-polig 2-fas motormanövrering
Den borstlösa likströmsmotorn drivs av en elektronisk drivenhet som växlar matningsspänningen mellan statorlindningarna när rotorn svänger. Rotorpositionen övervakas av omvandlaren (optisk eller magnetisk) som tillhandahåller information till den elektroniska styrenheten och baserat på denna position bestäms den statorlindning som ska aktiveras. Denna elektroniska drivenhet består av transistorer (2 för varje fas) som drivs via en mikroprocessor.

BLDC-DC
Magnetfältet som genereras av de permanenta magneterna samverkar med fältet som induceras av strömmen i statorlindningarna, vilket skapar ett mekaniskt vridmoment. Den elektroniska omkopplingskretsen eller drivenheten växlar matningsströmmen till statorn för att bibehålla en konstant vinkel på 0 till 90 grader mellan de samverkande fälten. Hallsensorer är mestadels monterade på statorn eller på rotorn. När rotorn passerar genom hallsensorn, baserat på nord- eller sydpolen, genererar den en hög eller låg signal. Baserat på kombinationen av dessa signaler definieras lindningen som ska aktiveras. För att hålla motorn igång, bör magnetfältet som produceras av lindningarna växla läge när rotorn rör sig för att komma ikapp med statorfältet.

Krets
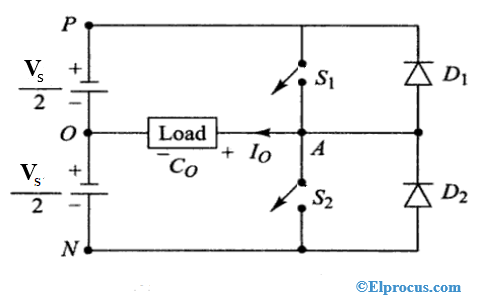
I en 4-polig, 2-fas borstlös likströmsmotor används en enda hallsensor som är inbäddad i statorn. När rotorn roterar känner hallsensorn positionen och utvecklar en hög eller låg signal beroende på magnetens pol (norr eller söder). Hallsensorn är ansluten via ett motstånd till transistorerna. När en högspänningssignal inträffar vid sensorns utgång, börjar transistorn ansluten till spole A leda, vilket ger banan för strömmen och därmed aktiverar spolen A. Kondensatorn börjar ladda till full matningsspänning. När hallsensorn upptäcker en förändring av rotorns polaritet utvecklar den en lågspänningssignal vid dess utgång och eftersom transistorn 1 inte får någon matning är den i avstängt tillstånd. Spänningen som utvecklats runt kondensatorn är Vcc, vilket är matningsspänningen till 2ndtransistorn, och spolen B får nu ström när strömmen passerar genom den.
BLDC-motorer har fasta permanentmagneter, som roterar och har en fast ankar, vilket eliminerar problemen med att ansluta ström till den rörliga ankaret. Och möjligen fler poler på rotorn än statorn eller motståndsmotorerna. Den senare kan vara utan permanentmagneter, bara poler som induceras på rotorn och sedan dras in i ett arrangemang med tidsinställda statorlindningar. En elektronisk styrenhet byter ut borstad / kommutatorenheten för den borstade likströmsmotorn, som kontinuerligt växlar fasen till lindningarna för att hålla motorn roterande. Styrenheten utför jämförande tidsinställd effektfördelning genom att använda en halvledarkrets istället för borst- / kommutatorsystemet.

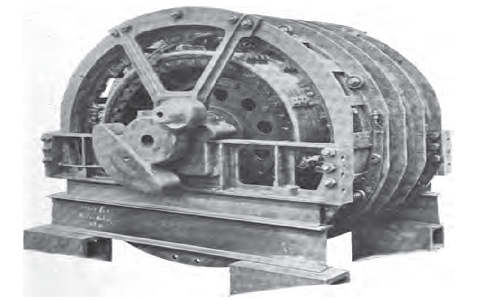
BLDC-motor
7 fördelar med borstlösa likströmsmotorer
- Bättre hastighet kontra vridmomentegenskaper
- Högt dynamiskt svar
- Hög effektivitet
- Lång livslängd på grund av brist på el- och friktionsförluster
- Ljudlös drift
- Högre hastighetsintervall
Tillämpningar:
Kostnaden för den borstlösa likströmsmotorn har minskat sedan den presenterades på grund av framsteg inom material och design. Denna minskade kostnad, i kombination med de många kontaktpunkter som den har över borstens likströmsmotor, gör den borstlösa likströmsmotorn till en populär komponent i många distinkta applikationer. Applikationer som använder BLDC-motorn inkluderar men är inte begränsade till:
- Hemelektronik
- Transport
- Uppvärmning och ventilation
- Industriteknik
- Modellteknik
Princip för att arbeta
Principerna för hur BLDC-motorer fungerar är samma som för en borstad likströmsmotor, d.v.s. den inre axelns lägesåterkoppling. När det gäller en borstad likströmsmotor implementeras återkoppling med en mekanisk kommutator och borstar. Inom BLDC-motor uppnås det med flera återkopplingssensorer. I BLDC-motorer använder vi mestadels en Hall-effekt-sensor, när rotormagnetiska poler passerar nära hall-sensorn, genererar de en HÖG eller LÅG nivå-signal, som kan användas för att bestämma axelns position. Om magnetfältets riktning är omvänd, kommer också den utvecklade spänningen att vända.
Styrning av en BLDC-motor
Kontrollenheten är implementerad av mikroelektronik har flera högteknologiska val. Detta kan implementeras med hjälp av en mikrokontroller, en dedikerad mikrokontroller, en hårdkopplad mikroelektronisk enhet, en PLC eller liknande annan enhet.
Den analoga styrenheten använder fortfarande, men kan inte bearbeta återkopplingsmeddelanden och kontrollera därefter. Med denna typ av styrkretsar är det möjligt att implementera högpresterande styralgoritmer, såsom vektorkontroll, fältorienterad styrning, höghastighetsstyrning som alla är relaterade till motorns elektromagnetiska tillstånd. Dessutom implementeras yttre slingstyrning för olika dynamikkrav, såsom glidande motorstyrningar, adaptiv kontroll, prediktiv styrning ... etc konventionellt.
Förutom alla dessa hittar vi högpresterande PIC (Power Integrated Circuit), ASIC (Application Specific Integrated Circuits) ... etc. som mycket kan förenkla konstruktionen av styrningen och den kraftelektroniska enheten båda. Till exempel har vi idag en komplett PWM-regulator (Pulse Width Modulation) i en enda IC som kan ersätta hela styrenheten i vissa system. Compound driver IC kan tillhandahålla en komplett lösning för att driva alla sex strömbrytare i en trefasomvandlare. Det finns många liknande integrerade kretsar med mer och mer att lägga till dag för dag. I slutet av dagen kommer systemmontering möjligen bara att omfatta en bit kontrollprogramvara med all hårdvara som kommer till rätt form och form.
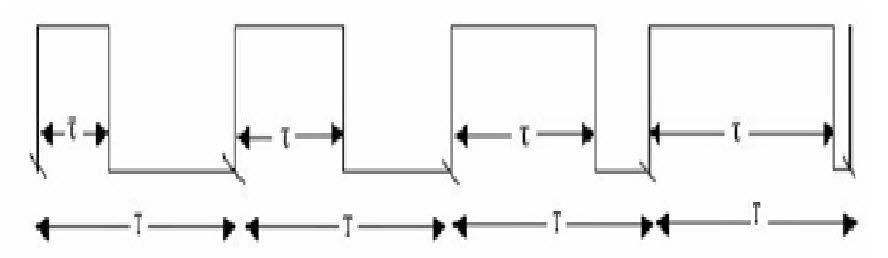
PWM-våg (Pulse Width Modulation) kan användas för att styra motorns hastighet. Här anges medelspänningen eller den genomsnittliga strömmen som flödar genom motorn kommer att ändras beroende på PÅ och AV-tiden för pulserna som styr motorns hastighet, dvs. vågens arbetscykel styr dess hastighet. När vi ändrar arbetscykeln (PÅ-tid) kan vi ändra hastigheten. Genom att byta utgångsportar kommer det effektivt att ändra motorns riktning.
Hastighets kontroll
Hastighetskontroll av BLDC-motorn är avgörande för att motorn ska fungera med önskad hastighet. Hastigheten för en borstlös likströmsmotor kan regleras genom att kontrollera ingångsspänningen. Ju högre spänning, desto mer är hastigheten. När motorn fungerar i normalt läge eller går under nominellt varvtal ändras ankarets ingångsspänning genom PWM-modellen. När en motor körs över nominellt varvtal försvagas flödet genom att mata ut utströmmen.
Hastighetskontrollen kan vara sluten eller öppen hastighetskontroll.
Öppen slinghastighetskontroll - Det handlar helt enkelt om att styra likspänningen som appliceras på motorns terminaler genom att hugga likspänningen. Detta resulterar dock i någon form av strömbegränsning.
Hastighetsreglering med sluten slinga - Det handlar om att kontrollera ingångsspänningen genom hastighetsåterkopplingen från motorn. Således styrs matningsspänningen beroende på felsignalen.
Den slutna hastighetskontrollen består av tre grundläggande komponenter.
- En PWM-krets för att generera de nödvändiga PWM-pulserna. Det kan vara antingen en mikrokontroller eller en timer-IC.
- En avkänningsanordning för att känna av den faktiska motorhastigheten. Det kan vara en halleffektsensor, en infraröd sensor eller en optisk kodare.
- En motordrift för att styra motordriften.
Denna teknik för att ändra matningsspänningen baserat på felsignalen kan antingen ske genom pid-kontrolltekniken eller med hjälp av suddig logik.
Tillämpning på hastighetskontroll av borstlös likströmsmotor

BLDC DC Motor Control
Motordriften styrs med hjälp av en optokopplare och ett MOSFET-arrangemang, där likströmsingång styrs genom PWM-tekniken från mikrokontrollern. När motorn roterar lyser den infraröda ledningen vid sin axel med vitt ljus på grund av närvaron av en vit fläck på axeln och reflekterar det infraröda ljuset. Fotodioden tar emot detta infraröda ljus och genomgår en förändring av dess motstånd, vilket orsakar en förändring av matningsspänningen till den anslutna transistorn och en puls ges till mikrokontrollern för att generera antalet rotationer per minut. Denna hastighet visas på LCD-skärmen.
Den erforderliga hastigheten anges i knappsatsen som är gränssnittet till mikrokontrollern. Skillnaden mellan den avkända hastigheten och den önskade hastigheten är felsignalen och mikrokontrollen genererar PWM-signalen enligt felsignalen, baserat på den otydliga logiken för att ge likströmsingången till motorn.
Således med användning av sluten styrning kan hastigheten hos den borstlösa likströmsmotorn styras och den kan bringas att rotera vid vilken önskad hastighet som helst.
Fotokredit:





{kind=link}