Artikeln förklarar en enkel linjeföljande fordonskrets, även känd som linjespårfordon, med bara några op-förstärkare och några andra komponenter utan att använda komplexa Arduino eller mikrokontroller.
Vad är ett Line Follower Vehicle
Ett linjeföljande fordon är en form av Automatic Guided Vehicle (AGV) som körs genom att detektera en vit linje ritad eller inbäddad på marken. Signalen från detektorerna befaller de motoriserade hjulen att automatiskt svänga och justera i enlighet med linjen, vilket ger ett intryck av att fordonet följer linjen. Därav namnlinjeföljaren.
I grund och botten är detektorerna i form av fotomotstånd som LDR eller halvledare ljusdetektorer såsom fotodioder eller fototransistorer .
Ett par sådana ljusdetektorer används som detekterar det reflekterade ljuset från den vita linjen och växlar en transistoriserad krets eller op amp-baserade komparatorer, som i sin tur styr hjulmotorerna i fordonet för att manövrera i enlighet med svängarna och kurvorna på den vita linjen på marken.
Använda fönsterkomparatorer
I den föreslagna linjeföljarkörkretsen har vi använt ett par op amp-komparatorer engagerade motorerna i balanseringen.
Op-förstärkarna är riggade som fönster delare . Som namnet antyder jämför en fönsterjämförare ingångssignalen från detektorerna med två extrema spänningsreferenser som utgör 'fönstertrösklarna'. Så länge insignalnivån ligger inom detta 'fönster' -referensgränsvärden bibehåller utgången från båda op-förstärkarna hög logik över sina utgångar.
I en händelse tenderar emellertid insignalen att korsa referenströsklarna, blir den relevanta förstärkarutgången låg, vilket resulterar i motsatta utgångar från op-förstärkarna. Denna obalans uppmanar utgångsenheterna att korrigera situationen genom att byta last på lämpligt sätt.
Hur kretsen fungerar
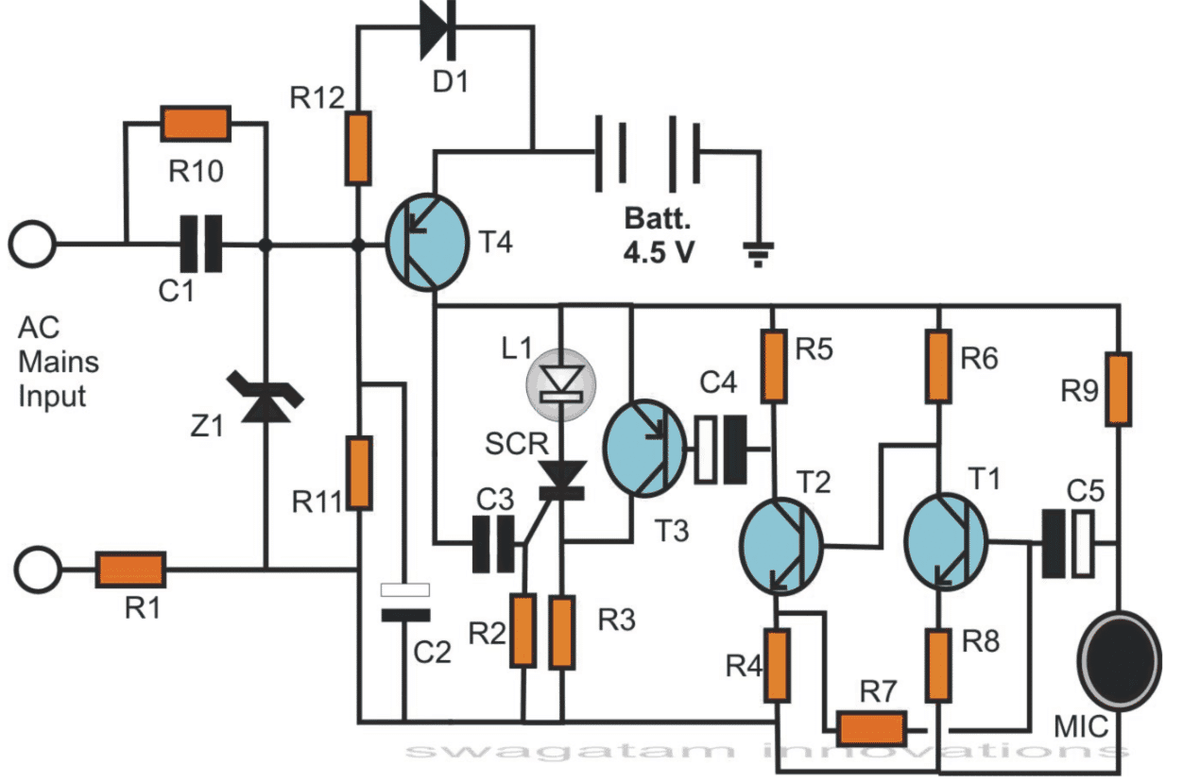
Med hänvisning till kretsschemat för linjeföljande fordon nedan kan vi se två op-förstärkare konfigurerade som fönsterkompartorer.

Op-förstärkarna kan vara från IC LM358 eller LM324
Den övre op-förstärkaren är ansluten för att kontrollera den övre tröskelgränsen, medan den nedre op-förstärkaren är ansluten för att styra den nedre tröskelgränsen.
Den inverterande ingången på op-förstärkaren A1 och den icke-inverterande ingången på op-förstärkaren A2 är fastspända med fast referensspänning
Den icke-inverterande ingången på op-förstärkaren A1 och den inverterande ingången på op-förstärkaren A2 är sammanbundna och används för att känna av variationerna i insignalen från ljusdetektorerna.
De två ljusberoende motstånden, LDR1 och LDR2, som fungerar som ljuskänsliga enheter är placerade som ljusdetektorer, så att de mottager det reflekterade ljuset från den vita linjen jämnt på dem.
Så länge ljuset på LDR är tillräckligt högt och enhetligt, förblir pin3 i A1 högre än dess pin2, eftersom LDR1 är fäst med den positiva linjen. Detta gör att dess produktion blir hög.
På samma sätt hålls pin6 i A2 lägre än sin pin5 på grund av LDR2-anslutningen till jordlinjen, och detta gör att utgången från A2 kan förbli hög.
Med andra ord, när LDR: erna är enhetligt tända, hålls de icke-inverterande (+) ingångarna på båda op-förstärkarna högre än deras inverterande (-) ingångar, vilket får deras utgångar att bli höga.
Med båda utgångarna höga håller transistordrivrutinerna respektive motorer enhetliga, vilket på motsvarande sätt gör att fordonet kan köra smidigt över en rak linje.
Hur fordonet följer linjen
När en krökt vit linje påträffas avviker en av LDR: erna från linjen och orsakar en skillnad i ljus vid kretsens punkt A. Detta får därefter den relevanta op-förstärkarutgången att bli låg och ett tillfälligt stopp av den aktuella motorn.
I denna situation tvingar den andra sidomotorn som fortfarande är i drift fordonet att svänga mot linjens böjningsvinkel, vilket för tillbaka den skuggade LDR i den upplysta delen av den vita linjen. När detta händer kommer båda motorerna att fungera igen så att fordonet kan köra normalt.
Ovanstående automatiska PÅ / AV-omkoppling över vänster / höger motor som svar på ljusvariationer från de böjda vita linjerna tvingar fordonet att fortsätta justera och manövrera i enlighet med den vita linjen.
Hur man bygger fordonet
I ett av mina tidigare inlägg lärde vi oss hur en enkelt fjärrstyrt fordon kunde byggas med hjälp av bara ett par motorer som är fästa vid den bakre kanten av ett rektangulärt kort, och ett par dummyhjul vid brädans framkant.

För den föreslagna linjeföljarkörkretsen använder vi också en liknande konstruktion för fordonet, som visas i figuren ovan.
Arrangemanget ser ganska enkelt ut, bakhjulen är fästa med motorer som styrs av transistordrivarna över op-förstärkarens utgångar.
När fordonet avviker från linjen stänger skillnaden i ljusnivå på LDR: erna en av förstärkarna, vilket stoppar den aktuella motorn.
Detta tvingar den motsatta sidomotorn som är i drift att svänga mot den stoppade motorn, vilket innebär att om den vänstra sidomotorn är bromsad, kommer fordonet att tvingas svänga mot vänster, justera till böjningslinjen, i samma riktning.
Detta föreslår också att vänster / höger motorintegration med op amp-utgångarna bör göras på lämpligt sätt så att böjningsriktningen för linjen och motorn som stoppas är på samma sida av fordonet.
Hur man placerar LDR
Eftersom de två LDR: erna (LDR1 och LDR2) ska känna det reflekterade ljuset från den vita linjen enhetligt, bör deras orientering vara vinkelrät mot linjens längd, som visas nedan.

Här har vi antagit att fordonet ska springa från höger till vänster efter en fastställd linje i samma väg.
LDR: s totala bredd bör ligga inom linjens bredd.
LDR-lamporna och lysdioden ska installeras på fordonets nedre yta, och helst på baksidan, precis under bakhjulsatsen.
Den angivna lysdioden är en vit lysdiod med ett 1K-motstånd i serie. Den måste placeras nära LDR och i mitten, så att ljuset från LDR inte når LDR direkt, istället ska ljuset nå LDR genom reflektion från den vita linjen under dem.
Motorspecifikationer
Motorerna kan vara av vilken borstad permanentmagnet som helst, men den ska vara utrustad med en växellåda för att säkerställa att fordonets rörelse är lämpligt långsam och stadig.
Motorns effekt ska vara enligt lasten som fordonet ska bära. Detta kan testas genom praktiskt experiment.
Hur man ställer in
För att ställa in den här linjeföljande fordonets krets måste du ordna en liten remsa med vit linje målad på en plan yta eller en vit tejp fast på den plana ytan.
Placera systemet (utan hjul) över linjen, som anges i föregående diagram, så att LDR och LED är rätt justerade inuti linjens bredd.
Slå på strömmen, den vita lysdioden ska lysa upp området under den. Justera de två förinställningarna tills båda motorerna slås på samtidigt.
För nu enheten åt höger så att LDR1 rör sig ut ur den vita linjen.
Den vänstra motorn ska stanna. Om den inte gör det justerar du P1 tills den vänstra motorn bara stannar.
Flytta sedan enheten något åt vänster så att LDR2 rör sig ut ur den vita linjen. Detta bör stoppa höger sida motor. Om det inte gör det justerar du 10k-förinställningen tills högermotorn bara stannar.
Detta kommer att slutföra installationsprocedurerna och nu kan du installera hjulen på motorerna och använda det här styrda fordonet för att automatiskt följa ett fastlagt spår på marken.
White Line vs Black Line
Det föreslagna linjeföljarsystemet är baserat på en vit linje inbäddad på marken istället för en svart linje. Fördelen med att använda en vit linje istället för en svart linje är följande:
Vit linje ser mer elegant och anständig ut än svart linje.
Vit linjebaserad linjeföljare kan fungera även i totalt mörker eller svaga omgivningsljus. Svarta ljusbaserade mönster kräver normalt en extern belysning för att hålla fordonet i drift.
En vit linjebaserad AGV fungerar mer exakt oavsett plattans färg, förutom brickor som är extremt vita eller motsvarar färgen på den vita linjen.
Konvertera fordonet till en svart linjeföljare
Trots ovanstående fördelar, om användaren föredrar att fordonet följer en svart linje, skulle systemet lätt kunna omvandlas för att göra det genom några få snabba modifieringar i den föreslagna designen.
Användaren bara för att byta eller byta ut ingångsstiftanslutningarna på op-förstärkarna med förinställningarna och ta bort lysdioden som är associerad med LDR.
Tidigare: 50 Watt Sine Wave UPS Circuit Nästa: Grundläggande elektroniska kretsar förklarade - Nybörjarguide för elektronik