
Nästan varje mekanisk utveckling som vi ser omkring oss åstadkommes av en elektrisk motor. Elektriska maskiner är en metod för att omvandla energi. Motorer tar elektrisk energi och producerar mekanisk energi. Elmotorer används för att driva hundratals enheter vi använder i vardagen. Elmotorer klassificeras i stort sett i två olika kategorier: likströmsmotor och växelströmsmotor. I den här artikeln ska vi diskutera DC-motorn och dess funktion. Och även hur växelströmsmotorer fungerar.
Vad är likströmsmotor?
TILL DC-motor är en elektrisk motor som går på likström. I en elmotor är operationen beroende av enkel elektromagnetism. En strömbärande ledare genererar ett magnetfält, när detta sedan placeras i ett externt magnetfält, kommer det att stöta på en kraft som är proportionell mot strömmen i ledaren och styrkan hos det yttre magnetfältet. Det är en enhet som omvandlar elektrisk energi till mekanisk energi. Det fungerar på det faktum att en strömbärande ledare placerad i ett magnetfält upplever en kraft som får den att rotera i förhållande till sin ursprungliga position. Praktisk likströmsmotor består av fältlindningar för att ge det magnetiska flödet och ankaret som fungerar som ledare.

Borstlös likströmsmotor
Ingången till en borstlös likströmsmotor är ström / spänning och dess uteffekt är vridmoment. Att förstå DC-motorns funktion är väldigt enkelt från ett grundschema som visas nedan. DC-motor består i princip av två huvuddelar. Den roterande delen kallas rotorn och den stationära delen kallas också stator. Rotorn roterar i förhållande till statorn.
Rotorn består av lindningar, varvid lindningarna är elektriskt associerade med kommutatorn. Borstarnas, kommutatorkontaktens och rotorlindningens geometri är sådan att när kraften appliceras, är polariteten hos den energiserade lindningen och statormagneterna feljusterade och rotorn kommer att rotera tills den är nästan nästan rätad ut med statorns fältmagneter.
När rotorn når uppriktningen flyttar borstarna till nästa kommutatorkontakter och aktiverar nästa lindning. Rotationen vänder strömriktningen genom rotorlindningen, vilket leder till att rotorns magnetfält vänds och får den att fortsätta rotera.
Konstruktion av likströmsmotor
DC-motorns konstruktion visas nedan. Det är mycket viktigt att känna till dess design innan du vet att den fungerar. De viktigaste delarna av denna motor inkluderar såväl armatur som stator.

LIKSTRÖMSMOTOR
Ankarspolen är den roterande delen medan den stationära delen är statorn. I detta är ankarspolen ansluten mot likströmsförsörjningen som inkluderar borstarna liksom kommutatorerna. Kommutatorns huvudfunktion är att omvandla växelström till likström som induceras i ankaret. Strömmen kan tillföras med borsten från motorns roterande del mot den inaktiva yttre belastningen. Ankarets anordning kan göras mellan de två polerna på elektromagneten eller permanent.
DC-motordelar
I likströmsmotorer finns det olika populära konstruktioner av motorer som finns som en borstlös, permanentmagnet, serie, sammansatt lindning, shunt, annars stabiliserad shunt. Generellt är likströmsmotorns delar desamma i dessa populära konstruktioner, men hela funktionen av detta är densamma. Huvuddelarna i likströmsmotorn inkluderar följande.
Stator
En stationär del som en stator är en av delarna i likströmsmotordelar som inkluderar fältlindningarna. Huvudfunktionen för detta är att få tillgången.
Rotor
Rotorn är den dynamiska delen av motorn som används för att skapa enhetens mekaniska varv.
Borstar
Borstar som använder en kommutator fungerar främst som en brygga för att fixera den stationära elektriska kretsen mot rotorn.
Kommutator
Det är en delad ring som är utformad med kopparsegment. Det är också en av de viktigaste delarna av likströmsmotorn.
Fältlindningar
Dessa lindningar är gjorda med fältspolar som kallas koppartrådar. Dessa lindningar runt ungefär slitsarna som bärs genom polskorna.
Armaturlindningar
Konstruktionen av dessa lindningar i DC-motorn är två typer som Lap & Wave.
Ok
En magnetisk ram som ett ok är ibland utformad med gjutjärn eller stål. Det fungerar som en vakt.
Stolpar
Stolpar i motorn inkluderar två huvuddelar som polkärnan samt stolpskor. Dessa väsentliga delar är sammankopplade med hydraulisk kraft och är anslutna till ok.
Tänder / slits
De icke-ledande slitsfodringarna fastnar ofta mellan slitsväggarna samt spolar för säkerhet från grunden, mekaniskt stöd och ytterligare elektrisk isolering. Det magnetiska materialet mellan slitsarna kallas tänder.
Motorhus
Motorns hölje stöder borstarna, lagren och järnkärnan.
Arbetsprincip
En elektrisk maskin som används för att omvandla energin från elektrisk till mekanisk kallas en likströmsmotor. De Likströmsmotorns arbetsprincip är att när en strömbärande ledare är belägen inom magnetfältet, så upplever den en mekanisk kraft. Denna styrriktning kan bestämmas genom Flemings vänstra styre såväl som dess storlek.
Om det första fingret förlängs kommer det andra fingret, såväl som vänsterhandens tumme, att vara lodrätt mot varandra och det primära fingret betyder magnetfältets riktning, nästa finger betyder den aktuella riktningen och det tredje fingerliknande tummen betyder kraftriktning som upplevs genom ledaren.
F = BIL Newtons
Var,
'B' är den magnetiska flödestätheten,
”Jag” är aktuell
'L' är ledarens längd i magnetfältet.
Närhelst en ankarlindning ges mot en likströmsförsörjning kommer strömmen att ställas in i lindningen. Fältlindning eller permanentmagneter ger magnetfältet. Så ankarledare kommer att uppleva en kraft på grund av magnetfältet baserat på ovanstående princip.
Kommutatorn är utformad som sektioner för att uppnå enkelriktat vridmoment, annars skulle kraftvägen ha vänt varje gång en gång ledarens rörelse vänds inom magnetfältet. Så detta är DC-motorns arbetsprincip.
Typer av DC-motorer
De olika typerna av likströmsmotorer diskuteras nedan.
Växlade DC-motorer
Växelmotorer tenderar att minska motorns hastighet men med en motsvarande ökning av vridmomentet. Den här egenskapen är till nytta eftersom likströmsmotorer kan rotera med hastigheter som är alltför snabba för att en elektronisk enhet ska kunna använda sig av. Kugghjulsmotorer består vanligtvis av en DC-borstmotor och en växellåda fäst vid axeln. Motorer kännetecknas av att de är anslutna till två anslutna enheter. Den har många applikationer på grund av dess kostnad för design, minskar komplexiteten och konstruerar applikationer som industriell utrustning, ställdon, medicinska verktyg och robotik.
- Ingen bra robot kan någonsin byggas utan växlar. Sammantaget är en mycket god förståelse för hur växlar påverkar parametrar som vridmoment och hastighet.
- Kugghjul fungerar på principen om mekanisk fördel. Detta innebär att genom att använda distinkta växeldiametrar kan vi byta mellan rotationshastighet och vridmoment. Robotar har inte ett önskvärt förhållande mellan hastighet och vridmoment.
- I robotik är vridmoment bättre än hastighet. Med växlar är det möjligt att växla hög hastighet med bättre vridmoment. Ökningen av vridmomentet är omvänt proportionell mot minskningen av hastigheten.

Växlade DC-motorer
Hastighetsminskning i växlad likströmsmotor
Hastighetsminskning i växlar består av en liten växel som driver en större växel. Det kan finnas få uppsättningar av dessa reduktionsväxelsatser i en reduktionsväxellåda.

Hastighetsminskning i växlad likströmsmotor
Ibland är syftet med att använda en växelmotor att minska den roterande axelhastigheten hos en motor i anordningen som körs, till exempel i en liten elektrisk klocka där den lilla synkronmotorn kan rotera med 1200 varv / min men minskas till en varv / min för att köra sekundvisaren och ytterligare reduceras i klockmekanismen för att köra minut- och timmehänderna. Här är mängden drivkraft irrelevant så länge det är tillräckligt för att övervinna klockmekanismens friktionseffekter.
Serie DC-motor
En seriemotor är en likströmsmotor där fältlindning är ansluten internt i serie till ankarlindningen. Seriemotorn ger högt startmoment men får aldrig köras utan last och kan flytta mycket stora axellaster när den först får ström. Seriemotorer är också kända som en serielindad motor.
I seriemotorer är fältlindningarna associerade i serie med ankaret. Fältstyrkan varierar med progressioner i armaturström. Vid den tidpunkt då dess hastighet minskas med en belastning framskrider seriens motor mer utmärkt vridmoment. Dess startmoment är mer än olika typer av likströmsmotor.
Det kan också lättare utstråla värmen som har byggts upp i lindningen på grund av en stor mängd ström som transporteras. Hastigheten växlar avsevärt mellan full- och obelastning. När lasten tas bort ökar motorhastigheten och strömmen genom ankaret och fältspolorna minskar. Avlastning av stora maskiner är farlig.

Motorserien
Strömmen genom ankaret och fältspolarna minskar, styrkan hos flödeslinjerna runt dem försvagas. Om styrkan hos flödeslinjerna runt spolarna minskades med samma hastighet som strömmen som strömmar genom dem, skulle båda minska i samma takt vid
vilket motorhastigheten ökar.
Fördelar
Fördelarna med en seriemotor inkluderar följande.
- Stort startmoment
- Enkel konstruktion
- Det är enkelt att designa
- Underhåll är enkelt
- Kostnadseffektiv
Applikationer
Series Motors kan producera enorm vridkraft, vridmomentet från tomgång. Denna egenskap gör seriemotorer lämpliga för små elektriska apparater, mångsidig elutrustning etc. Seriemotorer är inte lämpliga när konstant hastighet behövs. Anledningen är att seriemotorernas hastighet varierar kraftigt med olika belastningar.
Shunt Motor
Shuntmotorer är shunt-likströmsmotorer, där fältlindningarna shuntas till eller är anslutna parallellt med motorns ankarlindning. Shunt DC-motorn används ofta på grund av sin bästa hastighetsreglering. Således presenteras därför både ankarlindningen och fältlindningarna för samma matningsspänning, men det finns emellertid separata grenar för strömmen av ankarström och fältströmmen.
En shuntmotor har något distinkta arbetsegenskaper än en seriemotor. Eftersom shuntfältspolen är gjord av fin tråd kan den inte producera en stor ström för start som seriefältet. Detta innebär att shuntmotorn har extremt lågt startmoment, vilket kräver att axellasten är ganska liten.

Shunt Motor
När spänning appliceras på shuntmotorn, flyter en mycket låg mängd ström genom shuntspolen. Armaturen för shuntmotorn liknar seriemotorn och den kommer att dra ström för att producera ett starkt magnetfält. På grund av samspelet mellan magnetfältet runt ankaret och fältet som produceras runt shuntfältet börjar motorn att rotera.
Precis som seriemotorn, när ankaret börjar vrida, kommer det att producera EMF. Den bakre EMF kommer att orsaka att strömmen i ankaret börjar minska till en mycket liten nivå. Mängden ström som ankaret drar är direkt relaterad till lastens storlek när motorn når full hastighet. Eftersom belastningen i allmänhet är liten kommer ankarströmmen att vara liten.
Fördelar
Fördelarna med shuntmotor inkluderar följande.
- Enkel kontrollprestanda, vilket resulterar i hög flexibilitet för att lösa komplexa enhetsproblem
- Hög tillgänglighet, därför behövs minimal service
- Hög nivå av elektromagnetisk kompatibilitet
- Mycket smidig körning, därför låg mekanisk spänning i hela systemet och höga dynamiska styrprocesser
- Brett kontrollområde och låga hastigheter, därför universellt användbar
Applikationer
Shunt DC-motorer är mycket lämpliga för remdrivna applikationer. Denna motor med konstant hastighet används i industri- och fordonsapplikationer såsom verktygsmaskiner och lindnings- / avlindningsmaskiner där en stor mängd vridmomentprecision krävs.
DC-sammansatta motorer
DC-sammansatta motorer inkluderar ett separat upphetsat shuntfält som har ett utmärkt startmoment men det står inför problem inom applikationerna med variabel hastighet. Fältet i dessa motorer kan kopplas i serie genom ankaret såväl som ett shuntfält som är separat upphetsat. Seriefältet ger ett överlägset startmoment medan shuntfältet ger förbättrad hastighetsreglering. Men seriefältet orsakar kontrollproblem inom applikationerna för frekvensomriktare och används normalt inte i 4-kvadrantenheter.
Separat upphetsad
Som namnet antyder aktiveras fältlindningarna annars spolar via en separat likströmskälla. Det unika faktum med dessa motorer är att ankarströmmen inte tillför hela fältlindningarna, eftersom fältlindningen förstärks från en separat extern likströmskälla. Vridmomentsekvationen för likströmsmotorn är Tg = Ka φ Ia. I det här fallet ändras vridmomentet genom att ändra det arkiverade flödet 'φ' och oberoende av 'Ia' ankarström.
Själv upphetsad
Som namnet antyder, i denna typ av motor kan strömmen i lindningarna tillföras genom motorn i annat fall själva maskinen. Vidare är denna motor uppdelad i serielindad och shuntlindad motor.
Permanent DC-motor
PMDC eller DC-motor med permanentmagnet inkluderar en ankarlindning. Dessa motorer är utformade med permanentmagneter genom att placera dem på insidan av statorkärnan för att generera fältflödet. Å andra sidan inkluderar rotorn en konventionell likströmsarmatur inklusive borstar och kommutatorsegment.
I en permanentmagnet DC-motor kan magnetfältet bildas genom en permanentmagnet. Så ingångsströmmen används inte för excitation som används i luftkonditioneringsapparater, torkare, bilstarter etc.
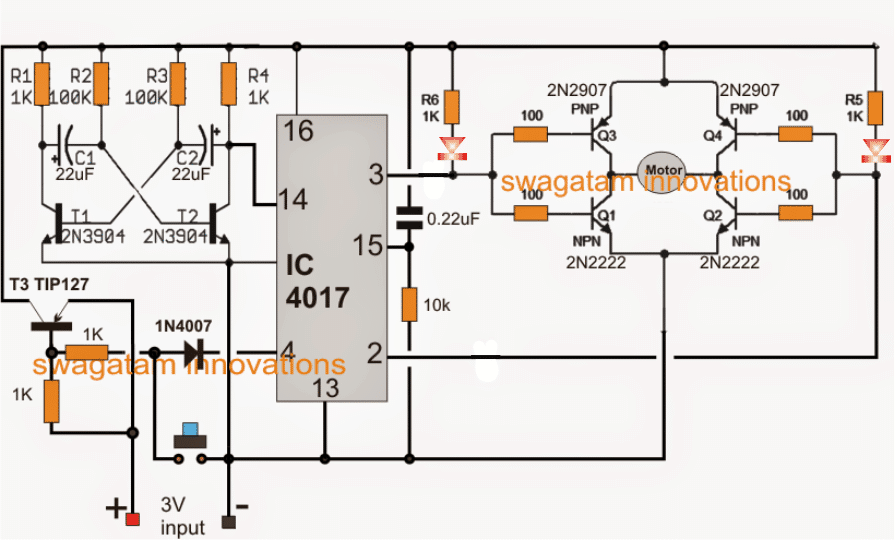
Anslut DC-motor med mikrokontroller
Mikrokontroller kan inte köra motorerna direkt. Så vi behöver någon form av förare för att kontrollera motorns hastighet och riktning. Motordrivrutinerna fungerar som gränssnittsanordningar mellan mikrokontroller och motorer . Motordrivrutiner fungerar som strömförstärkare eftersom de tar en lågströmstyrsignal och ger en högströmssignal. Denna högströmssignal används för att driva motorerna. Att använda L293D-chip är ett enkelt sätt att styra motorn med en mikrokontroller. Den innehåller två H-bryggkretsar internt.
Detta chip är utformat för att styra två motorer. L293D har två uppsättningar arrangemang där 1 uppsättning har ingång 1, ingång 2, utgång 1, utgång 2, med aktiveringsstift medan en annan uppsättning har ingång 3, ingång 4, utgång 3, utgång 4 med annan aktiveringsstift. Här är en video relaterad till L293D
Här är ett exempel på en likströmsmotor som är gränssnitt med L293D-mikrokontrollern.

DC-motor gränssnitt med L293D mikrokontroller
L293D har två uppsättningar arrangemang där en uppsättning har ingång 1, ingång 2, utgång 1 och utgång 2 och en annan uppsättning har ingång 3, ingång 4, utgång 3 och utgång 4, enligt ovanstående diagram,
- Om stift nr 2 och 7 är höga är stift nr 3 och 6 också höga. Om aktivering 1 och stift nummer 2 är höga lämnar stift nummer 7 så lågt roterar motorn framåt.
- Om aktivering 1 och stift nummer 7 är höga och stift nummer 2 är så låga roterar motorn i omvänd riktning.
Idag finns likströmsmotorer fortfarande i många applikationer så små som leksaker och hårddiskar eller i stora storlekar för att driva stålvalsverk och pappersmaskiner.
DC-motorekvationer
Storleken på det upplevda flödet är
F = Bl
Var, B- Flödestäthet på grund av flöde producerat av fältlindningar
l- Ledarens aktiva längd
I-ström som passerar ledaren
När ledaren roterar induceras en EMF som verkar i en riktning motsatt den matade spänningen. Det ges som

Var, Ø- Fluz på grund av fältlindningarna
P- Antal poler
A-A konstant
N - Motorns hastighet
Z- Antal ledare
Matningsspänningen, V = Eb+ JagtillRtill
Det utvecklade vridmomentet är
 Således är vridmomentet direkt proportionellt mot ankarströmmen.
Således är vridmomentet direkt proportionellt mot ankarströmmen.
Hastigheten varierar också med ankarströmmen, varför indirekt vridmoment och motorns hastighet är beroende av varandra.
För en DC-shuntmotor förblir hastigheten nästan konstant även om vridmomentet ökar från ingen belastning till full belastning.
För en DC-serie motor minskar hastigheten när vridmomentet ökar från ingen belastning till full belastning.
Således kan vridmomentet regleras genom att variera hastigheten. Hastighetskontroll uppnås antingen med
- Ändra flöde genom att styra strömmen genom fältlindning - Flux Control-metod. Med denna metod regleras hastigheten över dess nominella hastighet.
- Armaturspänningskontroll - Ger hastighetskontroll under dess normala hastighet.
- Supply Voltage Control - Ger hastighetskontroll i båda riktningarna.
4 Kvadrantdrift
Generellt kan en motor fungera i fyra olika regioner. De fyrkantig drift av likströmsmotor innehåller följande.
- Som motor framåt eller medurs.
- Som en generator i riktning framåt.
- Som motor i motsatt riktning eller moturs.
- Som en generator i omvänd riktning.

4 Kvadrantmanövrering av likströmsmotor
- I den första kvadranten driver motorn lasten med både hastighet och vridmoment i positiv riktning.
- I den andra kvadranten vänder vridmomentriktningen och motorn fungerar som en generator
- I den tredje kvadranten driver motorn lasten med hastighet och vridmoment i negativ riktning.
- I 4thkvadranten fungerar motorn som en generator i backläge.
- I den första och tredje kvadranten verkar motorn både framåt och bakåt. Till exempel motorer i kranar för att lyfta lasten och lägga ner den.
I den andra och fjärde kvadranten fungerar motorn som en generator i respektive riktning framåt och bakåt och ger energi tillbaka till strömkällan. Således är sättet att styra en motoroperation, att få den att fungera i någon av de fyra kvadranten genom att kontrollera dess hastighet och rotationsriktning.
Hastigheten styrs antingen genom att variera armaturspänningen eller försvaga fältet. Momentriktningen eller rotationsriktningen regleras genom att variera i vilken utsträckning den applicerade spänningen är större än eller mindre än den bakre emf.
Vanliga fel i DC-motorer
Det är viktigt att veta såväl som att förstå motorns fel och fel för att beskriva de lämpligaste säkerhetsanordningarna för varje fall. Det finns tre typer av motorfel som mekaniska, elektriska och mekaniska som växer till elektriska. De vanligaste misslyckandena inkluderar följande,
- Nedbrytning av isolering
- Överhettning
- Överbelastning
- Fel i lagret
- Vibration
- Låst rotor
- Feljustering av axel
- Omvänd körning
- Fas obalans
De vanligaste felen som uppstår i växelströmsmotorer, liksom likströmsmotorer, inkluderar följande.
- När motorn inte är korrekt monterad
- När motorn är blockerad av smuts
- När motorn innehåller vatten
- När motorn överhettas
12 V DC-motor
En 12V likströmsmotor är billig, liten och kraftfull som används i flera applikationer. Att välja lämplig likströmsmotor för en viss applikation är en utmanande uppgift, så det är mycket viktigt att arbeta igenom det exakta företaget. Det bästa exemplet på dessa motorer är METMotors, eftersom de tillverkar PMDC-motorer (permanentmagnet DC) med hög kvalitet i över 45 år.
Hur väljer man rätt motor?
Valet av en 12V likströmsmotor kan göras mycket enkelt via METmotors eftersom yrkesverksamma inom detta företag först kommer att studera din rätta applikation och därefter överväga många egenskaper och specifikationer för att garantera att du slutar med den bästa produkten som möjligt.
Driftspänningen är en av egenskaperna hos denna motor.
När en motor väl drivs med batterier väljs normalt låga driftsspänningar eftersom färre celler är nödvändiga för att få den specifika spänningen. Men vid höga spänningar är det normalt mer effektivt att köra en likströmsmotor. Trots att dess drift kan uppnås med 1,5 volt som går upp till 100V. De mest använda motorerna är 6v, 12v & 24v. Andra huvudspecifikationer för denna motor är hastighet, driftsström, kraft och vridmoment.
12V DC-motorerna är perfekta för olika applikationer genom en likströmsförsörjning som kräver både vridmoment och hög start. Dessa motorer arbetar med färre hastigheter jämfört med andra motorspänningar.
Funktionerna hos denna motor varierar huvudsakligen beroende på tillverkningsföretag och applikation.
- Motorhastigheten är 350 rpm till 5000 rpm
- Motorns nominella vridmoment varierar från 1,1 till 12,0 in-lbs
- Motorns uteffekt varierar från 01 hk till 21 hk
- Ramstorlekarna är 60 mm, 80 mm, 108 mm
- Utbytbara borstar
- Borstens typiska livslängd är 2000+ timmar
Tillbaka EMF i likströmsmotor
När den strömbärande ledaren är anordnad i ett magnetfält, kommer vridmomentet att inducera över ledaren och vridmomentet kommer att rotera ledaren som skär magnetfältets flöde. Baserat på fenomenet elektromagnetisk induktion när ledaren skär upp magnetfältet, och sedan kommer en EMF att inducera i ledaren.
Den inducerade EMF-riktningen kan bestämmas genom Flemmings högra regel. Enligt denna regel, om vi griper vår miniatyr-, pek- och långfinger med en vinkel på 90 °, kommer pekfingret att indikera vägen för magnetfältet efter det. Här representerar tumfingret ledarens sätt att röra sig och långfingret betecknar den inducerade EMF över ledaren.
Genom att tillämpa Flemings högerregel kan vi märka att den inducerade EMF-riktningen är omvänd till den applicerade spänningen. Så emf kallas back emf eller counter emf. Utvecklingen av back-emf kan göras i serie genom den spänning som appliceras, dock omvänd i riktning, det vill säga back-emf motstår strömmen som orsakar det.
Den bakre emf-storleken kan ges genom ett liknande uttryck som följande.
Eb = NP ϕZ / 60A
Var
'Eb' är motorns inducerade EMF som kallas Back EMF
'A' är nej. av parallella banor genom hela ankaret bland borstarna med omvänd polaritet
'P' är nej. av stolpar
'N' är hastigheten
'Z' är hela antalet ledare inom ankaret
'Φ' är ett bra flöde för varje pol.
I kretsen ovan är emf-storleken på baksidan alltid låg jämfört med den applicerade spänningen. Skillnaden mellan de två är nästan ekvivalent när likströmsmotorn fungerar under vanliga förhållanden. Strömmen kommer att inducera på likströmsmotorn på grund av huvudförsörjningen. Förhållandet mellan huvudförsörjningen, tillbaka EMF och ankarström kan uttryckas som Eb = V - IaRa.
Tillämpning för att styra likströmsmotordrift i fyra kvadranter
Styrning av likströmsmotorns funktion i fyra kvadranter kan uppnås med hjälp av en mikrokontroller som är gränssnitt med 7 omkopplare.

4 Quadrant Control
Fall 1: När start- och medursomkopplaren trycks in, ger logiken i mikrokontrollen en utgång av logik låg till stift 7 och logik hög till stift2, vilket gör att motorn roterar medurs och arbetar i 1stkvadrant. Motorns hastighet kan varieras genom att trycka på PWM-omkopplaren, vilket orsakar en applicering av pulser av varierande varaktighet på aktiveringsstiftet för drivrutinen IC, varigenom den applicerade spänningen varierar.
Fall 2: När frambromsen trycks in använder Microcontroller-logiken logik låg på pin7 och logisk hög på pin 2 och motorn tenderar att fungera i dess omvända riktning, vilket får den att stanna omedelbart.
På ett liknande sätt, genom att trycka moturs-omkopplaren, får motorn att röra sig i motsatt riktning, dvs. arbeta i 3rdkvadranten och genom att trycka på backbromsomkopplaren får motorn att stanna omedelbart.
Genom korrekt programmering av mikrokontrollern och genom omkopplare kan sålunda motordriften styras i varje riktning.
Således handlar det här om en översikt av DC-motorn. De fördelar med likströmsmotor är de ger utmärkt hastighetskontroll för acceleration och retardation, lätt att förstå design och en enkel, billig enhet design. Här är en fråga till dig, vad är nackdelarna med likströmsmotor?
Fotokrediter:
- Borstlösa DC-motorer Arbeta av news.softpedia
- 4 Kvadrantdrift av likströmsmotor med lh5.ggpht
- Växlad likströmsmotor av wikimedia
- Shunt Motor av zon





{kind=link}
{kind=link}
{kind=link}
{kind=link}