En mjukstartare är vilken enhet som helst som styr accelerationen hos en elmotor med hjälp av den applicerade spänningen.
Låt oss nu få en kort återkallelse av behovet av att ha en startmotor för vilken motor som helst.
En induktionsmotor kan starta själv på grund av samspelet mellan det roterande magnetfältflödet och rotorlindningsflödet, vilket orsakar en hög rotorström när vridmomentet ökar. Som ett resultat drar statorn hög ström och när motorn når full hastighet dras en stor mängd ström (större än märkströmmen) och detta kan orsaka uppvärmning av motorn och så småningom skada den. För att förhindra detta behövs motorstartare.
Motorstart kan ske på tre sätt
- Tillämpa full belastningsspänning med tidsintervall: Direkt start på nätet
- Använda reducerad spänning gradvis: Star Delta Starter och Soft starter
- Tillämpar dellindningsstart: Autotransformatorstartare
Definiera mjuk start
Låt oss nu flytta vår särskilda uppmärksamhet till mjukstart.
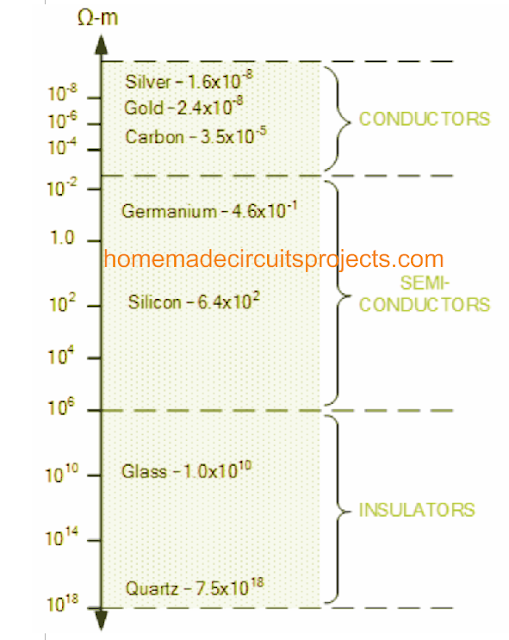
I tekniska termer är en mjukstartare vilken enhet som helst som minskar vridmomentet på elmotorn. Den består vanligtvis av halvledarenheter som tyristorer för att styra appliceringen av matningsspänning till motorn. Startmotorn fungerar på det faktum att vridmomentet är proportionellt mot startströmens kvadrat, vilket i sin tur är proportionellt mot den applicerade spänningen. Således kan vridmomentet och strömmen justeras genom att minska spänningen vid start av motorn.
Det kan finnas två typer av kontroller med mjukstartare:
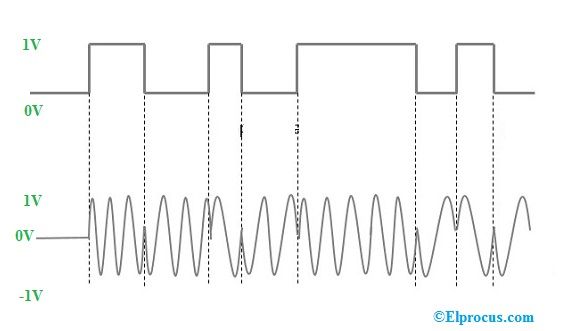
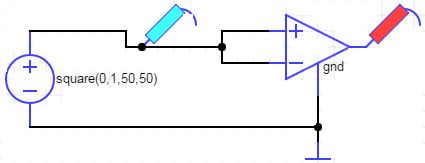
Öppna kontrollen : En startspänning appliceras med tiden, oavsett vilken ström som dras eller motorns hastighet. För varje fas är två SCR: er anslutna bakåt och bakåt och SCR: erna genomförs initialt med en fördröjning på 180 grader under respektive halvvågscykler (för vilka varje SCR utför). Denna fördröjning minskas gradvis med tiden tills den applicerade spänningen ramlar upp till full matningsspänning. Detta kallas också Time Voltage Ramp System. Denna metod är inte relevant eftersom den inte styr motoracceleration.
Closed-Loop Control : Vilken som helst av motorns utgångskarakteristika som strömmen eller hastigheten övervakas och startspänningen modifieras i enlighet med detta för att få önskat svar. Strömmen i varje fas övervakas och om den överstiger ett visst börvärde stoppas tidsspänningsrampen.
Således är den grundläggande principen för mjukstartaren genom att styra ledningsvinkeln för SCR: erna, appliceringen av matningsspänningen kan styras.
2 komponenter i en grundläggande mjukstartare
- Strömbrytare som SCR som behöver fasstyras så att de appliceras för varje del av cykeln. För en 3-fasmotor är två SCR-enheter anslutna rygg mot rygg för varje fas. Kopplingsenheterna måste klassificeras minst tre gånger mer än nätspänningen.
- Kontrolllogik använda PID-styrenheter eller mikrokontroller eller någon annan logik för att styra appliceringen av grindspänning på SCR, dvs för att styra SCR: s skjutvinkel för att göra SCR-ledningen vid den erforderliga delen av matningsspänningscykeln.
Arbetsexempel på elektroniskt mjukt startsystem för 3-fas induktionsmotor
Systemet består av följande komponenter.
- Två rygg mot rygg SCR för varje fas, dvs. 6 SCR totalt.
- Kontrolllogik-kretsar i form av två komparatorer - LM324 och LM339 för att producera nivån och rampspänningen och en optoisolator för att styra appliceringen av grindspänning till varje SCR i varje fas.
En strömförsörjningskrets för att tillhandahålla den nödvändiga likspänningen.

Blockdiagram som visar elektroniskt mjukt startsystem för 3-fas induktionsmotor
Nivåspänningen genereras med hjälp av komparatorn LM324 vars inverterande terminal matas med hjälp av en fast spänningskälla och den icke-inverterande terminalen matas genom en kondensator ansluten till kollektorn för en NPN-transistor. Laddning och urladdning av kondensatorn gör att komparatorns utgång ändras i enlighet därmed och spänningsnivån ändras från hög till låg. Denna utgångsnivåspänning appliceras på den icke-inverterande terminalen hos en annan komparator LM339 vars inverterande terminal matas med en rampspänning. Denna rampspänning produceras med användning av en annan komparator LM339 som jämför den pulserande likspänningen som appliceras vid dess inverterande terminal med den rena DC-spänningen vid dess icke-inverterande terminal och genererar en referenssignal för nollspänning som omvandlas till en rampsignal genom laddning och urladdning av en elektrolytkondensator.
3rdkomparatorn LM339 producerar en signal med hög pulsbredd för varje högnivåspänning, som minskar gradvis när nivåspänningen minskar. Denna signal inverteras och appliceras på Optoisolatorn, som ger grindpulser till SCR. När spänningsnivån sjunker ökar optoisolatorns pulsbredd och mer pulsbredd, mindre är fördröjningen och gradvis utlöses SCR utan någon fördröjning. Genom att styra varaktigheten mellan pulserna eller fördröjningen mellan applikationerna av pulser styrs sålunda SCR: s avfyrningsvinkel och appliceringen av matningsström styrs, varigenom motorns utgående vridmoment styrs.
Hela processen är ett styrsystem med öppen slinga där tidpunkten för applicering av grindutlösande pulser till varje SCR styrs baserat på hur tidigare rampspänningen minskar från nivåspänningen.
Fördelar med mjukstart
Nu när vi har lärt oss hur en elektroniskt mjukstartsystem fungerar, låt oss komma ihåg några skäl till varför det föredras framför andra metoder.
- Förbättrad effektivitet : Effektiviteten hos mjukstartsystemet med halvledarströmställare beror mer på den låga on-state-spänningen.
- Kontrollerad start : Startströmmen kan regleras smidigt genom att enkelt ändra startspänningen och detta säkerställer smidig start utan några ryck.
- Kontrollerad acceleration : Motoracceleration styrs smidigt.
- Låg kostnad och storlek : Detta säkerställs med hjälp av halvledarströmställare.