I det här inlägget ska vi utforska databladet för PIR eller Pyroelectric Infrared Radial Sensor HC-SR501. Vi förstår för vilket ändamål PIR-sensor används? Dess grundläggande utlösningsoperationer, stiftanslutningsdetaljer, tekniska specifikationer och slutligen kommer vi att titta på några verkliga applikationer.
Vi börjar med att förstå den verkliga PIR-sensorenheten som är installerad inuti standard PIR-moduler och lära sig dess interna egenskaper, pinout-detaljer och interna arbetsdetaljer.

Vad är en PIR-sensor?
PIR står för Pyroelectic Infrared Radial Sensor eller Passive Infrared Sensor. PIR är en elektronisk sensor som detekterar förändringarna i det infraröda ljuset över ett visst avstånd och ger ut en elektrisk signal vid dess utgång som svar på en detekterad IR-signal. Det kan upptäcka alla infraröda emitter som människor eller djur om det är inom sensorns område, eller rör sig bort från området eller rör sig inom sensorns område.
PIR-sensormodulen kan delas i två delar av en infraröd känslig kristall och bearbetningskretsen.
Illustration av PIR-känslig kristall:

Den mörka delen av metallen där den IR-känsliga kristallen är inrymd, den känsliga kristallen kan detektera nivån av infraröd i omgivningen. Den rymmer faktiskt två pyroelektiska sensorer för att upptäcka rörliga objekt. Om en av de känsliga kristallerna upptäcker förändring i infraröd (inkrement eller minskning) än den andra känsliga kristallen, blir utgången utlöst.
En kupolformad plaststruktur placeras normalt över denna känsliga kristall som fungerar som lins för att fokusera det infraröda ljuset på sensorerna.
Hur PIR fungerar
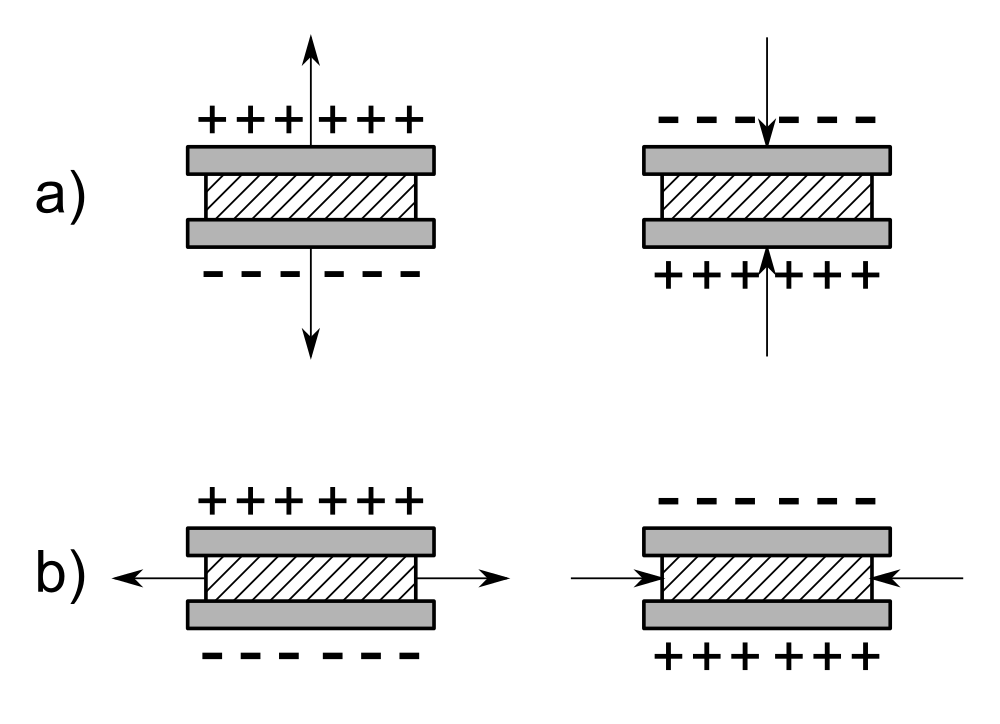
Avkänningsoperationen för en pyroelektrisk infraröd sensor är baserad på egenskapen eller karakteristiken som blir ansvarig för att ändra polarisationen av dess material som svar på temperaturförändringar.
Dessa sensorer använder en dubbel eller ett par avkänningselement för att känna av IR-signalerna i två steg, vilket säkerställer en idiotsäker detektering genom att avbryta de oönskade temperaturvariationerna inom det befintliga EMI-steget. Denna tvåstegsavkänningsprocess förbättrar sensorns övergripande stabilitet och hjälper till att upptäcka IR-signaler endast från mänsklig närvaro.
När en människa eller en relevant IR-källa rör sig förbi en PIR-sensor, skärs strålningen in i paret avkänningselement på ett alternativt sätt, vilket utlöser utgången för att generera ett par PÅ / AV eller höga och låga pulser, som visas i följande vågform:

Följande grova Gif-simulering visar hur en PIR-sensor reagerar på en rörlig människa och utvecklar ett par korta skarpa pulser över sina utgångsledningar för den nödvändiga bearbetningen eller utlöser ett lämpligt konfigurerat relästeg

Intern layout för en PIR
Följande bild visar den interna layouten eller konfigurationen inuti en standard PIR-sensor.

Till vänster kan vi se ett par IR-avkänningselement kopplade i serie. Den övre änden av denna serie är ansluten till porten till en inbyggd FET som fungerar som en liten IR-signalförstärkare. Rg pull down-motståndet ger den nödvändiga standby-nollogiken till FET för att säkerställa att den förblir helt avstängd i frånvaro av en IR-signal.
När en rörlig IR-signal detekteras av paret avkänningselement genererar den ett motsvarande par hög- och låglogiska signaler som diskuterats ovan:
Dessa pulser förstärks på lämpligt sätt av FET och replikeras vid dess utgångsstift för vidare bearbetning av en ansluten krets.
De tillhörande EMI-stegen tillsammans med kondensatorn ger extra filtrering av processen för att producera en ren uppsättning pulser vid den angivna utgångsstiftet på PIR.
Testinställningar för PIR-sensorn
Följande bild visar en standardinställning för PIR-sensortest. Utgången och Vss-stiften (negativ stift) på PIR är ansluten med ett externt neddragningsmotstånd, Vdd-stiftet levereras med en 5V-matning.

En svart papperstyp genererar den erforderliga motsvarande infraröda strålningen för PIR-sensorn genom en hackmekanism. Chopperplattan skär alternerande IR-signalerna och imiterar ett rörligt IR-mål.
Denna hackade IR-signal träffar PIR-sensorn och genererar de angivna pulserna över sin utgångsstift, som lämpligen förstärks genom en opamp för analys på ett omfång.
De ideala testförhållandena för ovanstående inställningar kan ses nedan:

Balansera sensing Element-utgången
Eftersom en dubbelavkänningsmekanism används i PIR, blir det nödvändigt att säkerställa att behandlingen genom paret linser är korrekt balanserad.
Avkänningselementen testas och konfigureras på lämpligt sätt genom att utvärdera respektive enkelutgångsspänning (SSOV) genom följande formel:
Vågen: | Va - Vb | / (Va + Vb) x 100%
Där Va = känslighet hos sida A (mV topp till topp)
Vb = Känslighetssida B (mV topp till topp)
Huvudspecifikationer
De viktigaste tekniska specifikationerna och dimensionsparametrarna för en PIR-sensor kan läras av följande detaljer:

Använda PIR-moduler
Idag hittar du PIR-moduler med en PIR-sensor integrerad med specialbearbetningskrets och lins. Detta förbättrar PIR: s prestanda många veck och gör det möjligt för slutanvändaren att få väldefinierade optimerade, förstärkta utdata från modulen.
Denna utgång behöver nu bara konfigureras med ett relästeg för den nödvändiga PÅ / AV-omkopplingen av en belastning som svar på en mänsklig närvaro över den angivna zonen.
Kretsen i standardmoduler består av IC BISS0001 som är speciellt utformad för rörelsedetekteringsapplikationer. Två rattar finns, en för att justera modulens känslighet och en annan för att justera tidslängden för hur länge utgången ska förbli HÖG efter att modulen har utlösts.

Låt oss nu undersöka de tekniska detaljerna för PIR-sensorn HC-SR501.
Driftspänning:
HC-SR501 är från 5 V till 20 V, vilket ger stor flexibilitet för kretsdesigners.
Nuvarande förbrukning:
HC-SR501 är en batterivänlig enhet, dess strömförbrukning är 65 mA när den upptäcker ändringar i IR-ljus.
Utspänning:
När modulen känner av en infraröd rörelse går utgången HÖG vid 3,3 V, om modulen inte känner av någon rörelse går den LÅG eller 0 V efter en fast period.
Försening:
En ratt är anordnad för att justera tiden för utgången att förbli HÖG efter detektering av IR. Denna tidsperiod kan justeras från 5 sekunder till 5 minuter.
Känslighetsområde:
Detektionsområdets vinkel är cirka 110 graders kon. En ratt ges för att justera känsligheten. Vi kan variera från 3 meter till 7 meter vinkelrätt mot senor. Känsligheten minskar när vi rör oss på båda sidor om sensorn.
Arbetstemperatur:
HC-SR501 har en imponerande arbetstemperatur från -15 till +70 grader Celsius.
Vilande ström:
Den vilande strömmen är den ström som förbrukas från matningen, när sensorn inte upptäcker någon rörelse eller när den är i viloläge. Det förbrukar mindre än 50 uA, vilket gör sensorbatteriet vänligt.

PIR-pinouts och trigger-lägen
Utlösarlägen:
PIR-modulen har två utlösarlägen: Enkel utlösare / icke-upprepningsläge och upprepad utlösare. Dessa två lägen kan nås genom att ändra bygelpositionen i modulen.
Enkel triggarläge / icke-upprepningsläge:
När PIR-sensorn är inställd i ett avtryckarläge (och timervredet / fördröjningstiden är inställt på 5 sekunder (säg)), när en människa detekteras, blir utgången HÖG i 5 sekunder och vänder LÅG.
Upprepa utlösarläge:
När PIR-sensorn är inställd i upprepat utlösarläge, när en människa detekteras, blir utgången HÖG räknar timern i 5 sekunder, men när en annan människa detekteras med under dessa 5 sekunder återställs timern till noll och räknar ytterligare 5 sekunder efter andra människa upptäcks.
Blockeringstid:
Blocktiden är det tidsintervall där sensorn är inaktiverad eller inte upptäcker rörelse. Blocktiden för HC-
SR501 är som standard 3 sekunder.
Detta inträffar efter att fördröjningstiden (som ställts in av timer-ratten) går utgången LÅG i 3 sekunder under detta intervall kommer ingen rörelse att upptäckas. Efter de tre sekunderna (LOW) är sensorn redo att upptäcka rörelse igen.
Med andra ord, när sensorn känner av rörelse blir utgången HÖG, förblir utgången HÖG enligt timerknappen (säg 5 sekunder), efter 5 sekunder går PIR-sensorn LÅG, LÅG-signalen förblir i 3 sekunder oavsett den nya rörelse om någon.
Modulens mått:
Sensorn är tillräckligt kompakt för att gömma sig från folks syn så att den inte påverkar dekorationer etc. Den mäter 32 mm x 24 mm.
Linsstorlek:
Den vita kupolstrukturen som omsluter den pyroelektriska sensorn kallas Fresnel-linser, vilket ökar detekteringsområdet och det ser ogenomskinligt ut. Den mäter 23 mm i diameter.
Tillämpningar:
• Säkerhetssystem.
• Automatiska lampor.
• Industriell automatikkontroll.
• Automatiska dörrar.
Du hittar några av projekten med hjälp av PIR-sensorn på den här webbplatsen.
Typisk PIR-modulkrets
För entusiaster som tänker bygga den kompletta PIR-modulen tillsammans med sensorn och en fullfjädrad förstärkare kan följande standardschema användas och användas för alla relevanta PIR-sensorbaserade applikationsutlösningar.

Har du ytterligare tvivel eller frågor? Tveka inte att lägga fram dem genom att kommentera nedan
Föregående: Arduino Full-Bridge (H-Bridge) Inverter Circuit Nästa: Fordonshastighetsdetektorkrets för trafikpolisen