En pick-and-place-robot är den som används för att plocka upp ett objekt och placera det på önskad plats. Det kan vara en cylindrisk robot som ger rörelse i horisontella, vertikala och roterande axlar, en sfärisk robot som ger två rotations- och en linjär rörelse, en ledad robot eller en scara-robot (fasta robotar med 3 vertikala axlar roterande armar).
Fördelar
Innan vi går vidare, låt oss se några anledningar till att välja och placera robotar är att föredra:
- De är snabbare och kan få jobbet gjort på några sekunder jämfört med deras mänskliga motsvarigheter.
- De är flexibla och har rätt design.
- De är korrekta.
- De ökar säkerheten i arbetsmiljön och blir faktiskt aldrig trötta.
Delar av en Pick N Place-robot

Välj N Place Robot
Låt oss se vad pick-and-place-roboten faktiskt består av:
- Till Rover : Det är robotens huvudkropp som består av flera styva kroppar som en cylinder eller en sfär, leder och länkar. Det är också känt som en manipulator.
- Sluteffekt : Det är kroppen som är ansluten till den sista fogen av roveren som används för att gripa eller hantera föremål. Det kan vara en analogi med en människas arm.
- Ställdon : De är robotens förare. Det aktiverar faktiskt roboten. Det kan vara vilken motor som helst som servomotor, stegmotor eller pneumatiska eller hydrauliska cylindrar.
- Sensorer: De används för att känna av det interna såväl som det externa tillståndet för att se till att roboten fungerar smidigt som helhet. Sensorer involverar pekssensorer, IR-sensorer etc.
- Kontroller : Den används för att styra manöverdonen baserat på sensoråterkopplingen och därmed styra rörelsen hos varje led och så småningom rörelsen hos sluteffektorn.
Arbeta med en grundläggande plockrobot:
Grundfunktionen för a plocka och placera robot görs av dess leder. Fogar är analoga med mänskliga leder och används för att förena de två på varandra följande styva kropparna i roboten. De kan vara roterande fog eller linjär fog. För att lägga till en gemensam koppling till vilken robot som helst måste vi veta om frihetsgraderna och rörelsegraderna för den kroppsdelen. Frihetsgrader implementerar kroppens linjära och roterande rörelse och rörelsegrader antyder antalet axlar som kroppen kan röra sig.

En enkel plockningsrobot
En enkel pick-and-place-robot består av två styva kroppar på en rörlig bas, förbunden med en roterande skarv. En roterande skarv är en som ger rotation i 360 grader runt någon av axlarna.
- Botten eller basen är fäst med hjul som ger linjär rörelse.
- Den 1ststyv kropp är fixerad och stöder den andra styva kroppen till vilken ändeffektorn är anordnad.
- 2ndstyv kropp är försedd med rörelse i alla 3 axlarna och har 3 frihetsgrader. Den är ansluten till 1stkropp med en roterande fog.
- Ändeffektorn ska rymma alla 6 frihetsgrader, för att nå alla sidor av komponenten, för att ta position till vilken höjd som helst.
Sammantaget fungerar den grundläggande plock- och placeringsroboten enligt följande:
- Hjulen under basen hjälper till att flytta roboten till önskad plats.
- Den styva kroppen som stöder ändeffektorn böjer eller räcker upp för att nå den position där objektet placeras.
- Ändeffektorn plockar upp föremålet med ett starkt grepp och placerar det i önskad position.
Nu när vi har en kort uppfattning om pick and place-roboten är grundfrågan hur den faktiskt styrs.
En enkel pick-and-place-robot kan styras genom att styra rörelsen hos dess sluteffektor. Rörelsen kan använda hydraulisk rörelse, dvs. använda hydraulvätska under tryck för att driva roboten, eller använda pneumatisk rörelse, dvs. använda tryckluft för att orsaka mekanisk rörelse. Det mest effektiva sättet är dock att använda motorer för att tillhandahålla den nödvändiga rörelsen. Motorerna måste kontrolleras för att ge roboten och sluteffektorn nödvändig rörelse.
Arbetsexempel på att styra en Pick N Place-robot
Vad sägs om att kontrollera roboten med några få knappar på knappsatsen? Ja det är möjligt! Genom att bara trycka på önskad knapp kan vi överföra kommando till roboten för att få den att röra sig i vilken riktning som helst för att uppnå vår uppgift. Dessutom kan detta uppnås med enkel trådlös kommunikation.
Låt oss se hur detta faktiskt fungerar:
Sändardelen består av knappsatsen som är gränssnitt till mikrokontrollern. Varje knappnummer i decimalformat omvandlas till 4-siffrigt binärt av mikrokontrollern och den parallella utgången vid en av dess port appliceras på kodaren. Kodaren konverterar denna parallella data till seriell data och den matas till sändaren, utrustad med en antenn för att sända seriell data.

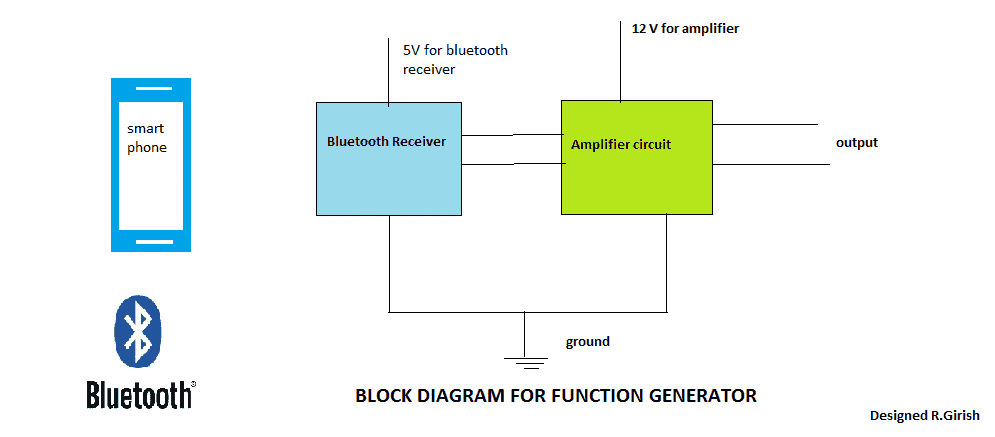
Blockdiagram som visar sändaren av en Pick N Place-robot
Mottagarsidan består av en avkodare som är gränssnitt till mikrokontrollern. Avkodaren konverterar det mottagna kommandot i serieformat till den parallella formen och ger dessa data till mikrokontrollern. Baserat på detta kommando skickar mikrokontrollen lämpliga ingångssignaler till motorförarna för att driva respektive motorer.

Blockdiagram som visar mottagare av en Pick N Place-robot
Systemet består av två motorer för att ge rörelse till hela roboten och två andra motorer för att ge armrörelsen. Ändeffektorn eller griparen måste styras för att applicera korrekt tryck på objektet för att hantera det effektivt, för att ge det en mjukt grepp . Detta säkerställs genom att styra armmotorerna genom korrekt kommando. Utgången från armmotorerna är ansluten till ett 10Ohm / 2W motstånd och vid tidpunkten för motor över belastning eller låst tillstånd utvecklas en hög spänning över motståndet, vilket orsakar en logisk hög nivå vid utgången från optoisolatorn och avbrottet stift på mikrokontrollern som är ansluten till optoisolatorutgången via en pnp-transistor får logisk låg signal, vilket stoppar alla andra operationer hos griparen.
Således, genom enkel RF-kommunikation, kan vi faktiskt styra en pick-and-place-robot.
Praktiska tillämpningar av pick and place-robot:
- Försvarsapplikationer : Den kan användas för övervakning och även för att plocka upp skadliga föremål som bomber och sprida dem säkert.
- Industriella applikationer : Dessa robotar används vid tillverkning, för att plocka upp nödvändiga delar och placera dem i rätt läge för att komplettera maskinens fixtur. Den kan också användas för att placera föremål på transportbandet samt plocka upp defekta produkter från transportbandet.
- Medicinska applikationer : Dessa robotar kan användas i olika kirurgiska operationer som vid ledersättningsoperationer, ortopediska och interna operationer. Det utför operationerna med mer precision och noggrannhet.
Förutom dessa applikationer kan dessa robotar också användas i olika andra applikationer som är lämpliga för mänskligheten.
Nu återstår frågan - Hur långt är dagen då robotar kommer att underlätta vägen för människor helt?