Bode- och Nyquist-plotterna är mycket populära plotter, speciellt för elektrokemisk impedansspektroskopi eller EIS-data bland elektrokemister. Så, Nyquist Plot är uppkallad efter en svensk-amerikan nämligen 'Harry Nyquist'. Han är en elektriker och utvecklade denna tomt för elektronikändamål år 1932. Under en MKB samlas mycket information in och denna insamlade information måste presenteras. Så en bild ger mer information än hundra ord. Så en grafisk representation som en Nyquist-plot används för att visa en elektrokemisk impedansspektroskopi. Den här artikeln ger information om Nyquist tomt – arbete, fördelar och dess nackdelar.
Nyquist Plot Definition
Den grafiska representationen som används ofta för överföringsfunktioner är känd som Nyquist-plotten. Detta är ett frekvenssvarsdiagram som används för att bedöma styrsystemet med återkopplingsstabilitet. Det är en parametrisk plot för den verkliga och imaginära delen av en överföringsfunktion inom det komplexa planet eftersom frekvensparametern sveper genom ett specificerat intervall. I kartesiska koordinater är nyquistplottöverföringsfunktionens reella del plottad på X-axeln medan den imaginära delen av överföringsfunktionen plottas på Y-axeln.
Nyquist Plot används i såväl automatisk styrning som signalbehandling för analys av stabilitet eftersom vem som helst omedelbart kan verifiera om en slinga med negativ feedback uppfyller Nyquists stabilitetsprincip. Om Nyquist tomten av öppen slinga kontrollsystem täcker ungefär punkten över den verkliga axeln efteråt är det motsvarande slutna kretssystemet instabilt.
Nyquist Plot Graph
Nyquists plot-grafer är förlängningen av polära plots som främst används för att hitta slutna styrsystem stabilitet genom att helt enkelt ändra 'ω' från −∞ till ∞. Det betyder att dessa plots mestadels används för att rita överföringsfunktionens totala frekvenssvar. Nyquist-plotten utvärderar helt enkelt styrsystemets stabilitet med feedback. Så i ett kartesiskt koordinatsystem plottas överföringsfunktionens reella par helt enkelt över X-axeln medan den imaginära delen helt enkelt plottas över Y-axeln.
Den liknande Nyquist-plotten kan enkelt förklaras med polära koordinater, där överföringsfunktionens förstärkning är den radiella koordinaten, och överföringsfunktionens fas är den ekvivalenta vinkelkoordinaten.
Nyquist-intrigen kan förstås genom att känna till några av de terminologier som används. I Nyquists plot kallas en stängd bana inom ett komplext plan en kontur.
Nyquiststigen
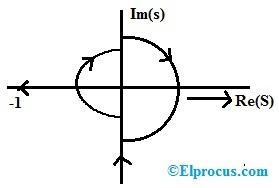
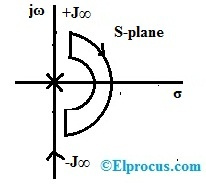
Nyquist-banan eller Nyquist-konturen är en sluten kontur inom s-planet som helt omsluter hela högra sidan av s-planet. För att omsluta planets totala RHS, ritas en stor halvcirkelbana av en diameter längs 'jω'-axeln & mitten vid källan. Halvcirkelradien behandlas helt enkelt som Nyquist Encirclement.

Nyquist Inringning
En punkt är känd för att vara omgiven av en linje om den finns i kurvan.
Nyquist Mapping
Proceduren genom vilken en punkt inom s-planet ändras till en punkt inom F(s)-planet kallas mappning & F(s) är känd som mappningsfunktionen.
Stabilitetsanalysen av återkopplingsstyrsystemet beror huvudsakligen på att känna igen lokaliseringsrötterna för den karakteristiska ekvationen ovanför s-planet.
Således, om roten på s-planet ligger på den vänstra sidan så är kontrollsystemet stabilt. Så systemets relativa stabilitet kan bestämmas genom olika frekvenssvarstekniker som Nyquist plot, Bode plot & Nichols plot.
Nyquist stabilitetskriterium
Nyquist-stabilitetskriteriet används främst för att känna igen förekomsten av rötter för en karakteristisk ekvation i S-planets speciella region. Nyquists stabilitetskriterium som N = Z – P säger helt enkelt det. 'N' är det totala antalet omringningar avseende ursprunget, 'P' är antalet poler och 'Z' är det totala antalet nollor.
I fall 1: När N = 0 (ingen inringning), alltså Z = P = 0 & Z = P.
Om N = 0, bör P vara '0' så att systemet är stabilt.
I fall 2: När N är större än 0 (medurs omringning), alltså P = 0, Z ≠0 & Z > P
I dessa två fall är systemet instabilt.
I fall 3: När N är mindre än 0 (moturs omringning), alltså Z = 0, P ≠0 & P > Z
Därmed är systemet stabilt.
Hur man ritar Nyquist plot?
Det finns många steg involverade i att rita nyquist plot som diskuteras nedan.
- I steg 1: Behöver kontrollera polerna för en öppen slingöverföringsfunktion som G(s)H(s) inom 's' plan.
- I steg 2: Välj rätt Nyquist-kontur genom att inkludera hela högra sidan av s-planet genom att helt enkelt rita en halvcirkel med radien 'R' där R tenderar mot oändlighet.
- I steg 3: Känn igen olika segment på konturen med plats till Nyquist-banan.
- I steg 4: Mappningssegmentet måste prestera genom segmentet genom att helt enkelt ersätta respektive segmentekvation i mappningsfunktionen. I allmänhet måste vi rita de polära plotten för det specifika segmentet.
- I steg 5: I allmänhet är segmentmappningen reflekterande bilder av mappningen för den speciella banan för den positiva imaginära axeln.
- I steg 6: Den halvcirkelformade banan som täcker den högra halvan av planet mappas normalt till en punkt inom G(s) H(s)-planet.
- I steg 7: Koppla samman alla olika mappningssegment för att ge det nödvändiga Nyquist-diagrammet.
- I steg 8: Notera nr. av medurs omringningar omkring (-1, 0) & avgör stabilitet genom N = Z – P.
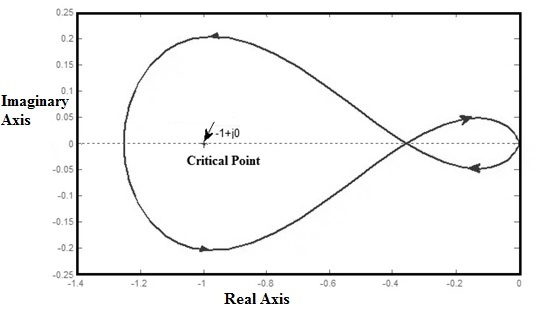
När Nyquist-diagrammet väl har ritats kan vi upptäcka stabiliteten i det slutna styrsystemet med Nyquist-stabilitetskriteriet. Så, om den kritiska punkten (-1+j0) ligger på utsidan av omkretsen, är styrsystemet med sluten slinga helt stabilt.
Den öppna slinga-överföringsfunktionen är G(S)H(S) = N(S)/D(S).
Den slutna överföringsfunktionen är G(S)/1+ G(S)H(S).
N(s) = noll är den öppna slingan noll & D(s) är den öppna slingans pol.
Ur stabilitetssynpunkt får inga poler med sluten slinga ligga på s-planets högra sida. Karakteristikekvationen som 1 + G(s) H(s) lika med noll betecknar poler med sluten slinga.
När 1 + G(s) H(s) är lika med noll så måste q(s) vara noll.
Så ur stabilitetssynpunkt bör nollor av q(s) inte ligga inom s-planets högra plan.
För att beskriva styrkan måste hela RHP beaktas. Så vi föreställer oss en halvcirkel som inkluderar alla punkter inom RHP genom att betrakta halvcirkelradien 'R' som tenderar till oändlighet.
Stabilitetsanalys med Nyquist Plot
Från Nyquist-diagrammet kan vi se om styrsystemet är stabilt, instabilt eller marginellt stabilt beroende på parametervärdena.
- Få övergångsfrekvens och fasövergångsfrekvens.
- Vinstmarginal & fasmarginal.
Fasövergångsfrekvens.
Frekvensen vid vilken punkt Nyquist-diagrammet möter den negativa reella axeln kallas fasövergångsfrekvensen och den betecknas med ωpc.
Få korsningsfrekvens
Frekvensen vid vilken punkt Nyquist-diagrammet har en magnitud kallas förstärkningsövergångsfrekvensen och den betecknas med ωgc.
Styrsystemets stabilitet baserat på huvudförhållandet mellan de två frekvenserna som fasöverkorsning såväl som förstärkningsövergång diskuteras nedan.
- Om ωpc är högre jämfört med ωgc är styrsystemet stabilt.
- Om ωpc är ekvivalent med ωgc är styrsystemet något stabilt.
- Om ωpc är mindre jämfört med ωgc är styrsystemet inte stabilt.
Vinst marginal
Förstärkningsmarginalen är ekvivalent med den reciproka av Nyquist-diagrammets storlek vid fasövergångsfrekvensen.
Vinstmarginal (GM) =1/Mpc
Där 'Mpc' är storleken inom normal skala vid ωpc eller fasövergångsfrekvensen
Fasmarginal
Fasmarginalen är ekvivalent med summan av 180 grader och fasvinkeln vid ωgc eller förstärkningsövergångsfrekvensen.
PM = 1800 + ϕgc
Där ϕgc är fasvinkeln vid förstärkningsövergångsfrekvensen (ωgc).
Styrsystemets stabilitet beror på huvudförhållandet mellan de två marginalerna som förstärkningsmarginalen och fasmarginalen som anges nedan.
Om förstärkningsmarginalen är högre än en och fasmarginalen är positiv, är styrsystemet stabilt.
Om förstärkningsmarginalen är likvärdig med en och fasmarginalen är '0' grader, är styrsystemet något stabilt.
Om förstärkningsmarginalen är låg än en och fasmarginalen är negativ, är styrsystemet inte stabilt.
Nyquist Plot Exempel Problem
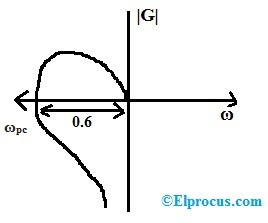
Ex1: Om Nyquist-diagrammet skär den negativa reella axeln vid 0,6-avståndet vad är då systemets förstärkningsmarginal?
Vi vet att systemets förstärkningsmarginal kan definieras som mängden förändring som krävs inom öppen loop förstärkning för att göra ett slutet system instabilt.
Vinstmarginal eller GM = 1/|G| wpc
Där är systemets vinst |G| och wpc är fasövergångsfrekvensen.
Fasövergångsfrekvensen kan definieras som; frekvensen vid vilken tidpunkt systemförstärkningen är '0'.
Gm = 1/0,6 = 1,66
Ex2: Systemöverföringsfunktionen med öppen slinga för negativt återkopplingssystem med enhetsförstärkning kan ges som G(s) = 1/S(S+1). Nyquistkurvan inom S-planet inkluderar hela högerplanet och ett litet område runt origo på vänster sida som visas i följande graf. Nejet. av omringningar av (-1+ j0) punkten genom G(S) Nyquist-plotten, motsvarande Nyquist-konturen som indikeras som 'N' sedan 'N' ekvivalent med?
Nejet. av omringningar för den (-1+ j0) signifikanta punkten ges genom N = P-Z.
Där 'N' är antalet inringningar av denna kritiska punkt i moturs riktning.
'P' är antalet poler med öppen slinga inom höger sida av S-planet.
'Z' är antalet poler med sluten slinga inom höger sida av S-planet.
N = P för stabilitet Z = 0.
Den ovan angivna formeln är endast giltig när Nyquist-kurvan är definierad för höger sida av S-planet och polerna är exkluderade vid källan. Kurvans rotation ska vara medurs och den kritiska punktens omringning är i riktning moturs.
G(s) = 1/S(S+1).
De öppna polerna är närvarande vid S = 0,-1
Överföringsfunktionen för sluten slinga = 1/S^2+S+1
Numret på den stängda polen över höger sida är noll.
Men Nyquist-konturen definieras för den totala halva sidan av S-planet och innehåller också polen vid origo.
Sålunda, vid S=0 betraktas den öppna slingpolen som polen inom höger sida av S-planet.
N = P-Z =>1-0 =>1
Fördelar och nackdelar
De fördelarna med Nyquist tomt inkluderar följande.
- Nyquist-plotten är ett extremt användbart verktyg för att bestämma systemstabilitet.
- Den har många fördelar jämfört med Routh-Horwitz & root locus eftersom den helt enkelt hanterar tidsfördröjningar.
- Men det är mest användbart eftersom det ger oss en metod att använda Bode-plotten för att bestämma stabilitet.
- Genom att använda detta kan styrsystemets stabilitet bestämmas.
- En öppen slinga överföringsfunktion hittas genom att helt enkelt mäta dess frekvenssvar.
- Det är bättre jämfört med rotlokuset när det gäller tidsfördröjning vilket innebär att Nyquist-plotten helt enkelt kan hantera tidsfördröjningen inom systemet.
- Den kan lokalisera den öppna överföringsfunktionens frekvenssvar.
- Den finner nr. av stolpar tillgängliga stolpar på höger sida av s-planet.
- Den hittar systemets relativa stabilitet/
De nackdelar med Nyquist tomt inkluderar följande.
- Nyquist plot använder några svåra matematiska metoder.
- Det kan inte lösa systemets fullständiga styrka.
- Den ger inte exakt information om de tillgängliga polerna på höger sida av s-planet.
Nyquist Plot Applications
Tillämpningarna av Nyquist-tomten inkluderar följande.
- Nyquist-plotten används för att etablera systemstabiliteten genom en grafisk process inom frekvensdomänen.
- En Nyquist-plot eller ett frekvenssvarsdiagram används huvudsakligen inom styrteknik och signalbehandling.
- Dessa är förlängningen för polära plotter, som används för att hitta stabiliteten i det slutna styrsystemet.
- Det är ett extremt användbart verktyg för att bestämma systemstabilitet.
- Med hjälp av en Nyquist-plot kan vi övervaka avståndet mellan de två punkterna (–1, 0) och punkten där kurvan korsar den negativa reella axeln.
Hur används Nyquist Plot för att bestämma stabilitet?
Stabilitet kan bestämmas genom att använda Nyquist Plot genom att helt enkelt titta på nr. av omringningar av punkten (−1, 0). Mångfalden av vinster som systemet kommer att vara stabilt på kan bestämmas genom att titta på de verkliga axelkorsningarna. Denna plot ger en del data om överföringsfunktionens form.
Vilka är Nyquists kriterier för provtagning?
Nyquistkriterierna kräver att samplingsfrekvensen är minst två gånger den maximala frekvensen i signalen. Om samplingsfrekvensen är låg än två gånger den högsta analoga signalfrekvensen, kommer ett fenomen som kallas aliasing att inträffa.
Vad används för Nyquist Plot?
En öppen slinga överföringsfunktion används för Nyquist Plot.
Vad är Nyquist-regeln?
Nyquists regel säger helt enkelt att en periodisk signal ska samplas vid över två gånger signalens maximala frekvenskomponent. Faktum är att, eftersom den tillgängliga tiden är begränsad, är en samplingsfrekvens något högre än den kräver.
Vad är Nyquist Bit Rate Formula for Noiseless?
Nyquist säger helt enkelt att i en 'B'-kanal med bandbredd kan du sända upp till 2B ortogonala signaler för varje sekund, alltså Rp ≤ 2B, varhelst 'Rp' är pulsfrekvensen.
Vad representerar Nyquists handling?
Nyquist-plotten representerar viss information om formen för överföringsfunktionen. Så till exempel; denna plot ger information om variationen mellan nr. av poler & nollor för överföringsfunktionen genom vinkeln vid vilken punkt kurvan når origo.
Detta är alltså en översikt över Nyquist-tomten – fördelar, nackdelar och dess tillämpningar. Nyquist-diagram används för att analysera egenskaperna hos kontrollsystemet som stabilitet, fasmarginal och förstärkningsmarginal. Nyquist Plot med Matlab hjälper oss att göra en Nyquist-plotgraf, relaterad till frekvenssvar som genereras genom en dynamisk modell. Här är en fråga till dig, vad är en bode plot?