Inlägget förklarar en enkel linjelaserstyrd motorförare krets, som fungerar genom att svara på en precision horisontell laserlinje, genererad från en linjelasernivåenhet, och justerar automatiskt inriktningen för det anslutna verktyget eller jobbet med extrem perfektion och noggrannhet.
Vad är Line Laser
Linjelaserutrustningen är en elektronisk ersättning med hög precision av snickarnas åldersnivå.
Linjelaseranordningen är faktiskt en avancerad laseremitterande utrustning som kan generera en 360 ° högprecisionsbelyst horisontell laserlinje, för att ge en kalibreringsreferens till alla industri- eller byggtekniska jobb, så att slutresultatet av jobbet blir helt rakt och inriktat utan en liten bit av fel.
Kretsen begärdes av en av de dedikerade läsarna på den här bloggen, Mr. Rafal.
De detaljerade diskussionerna om arbetsprocessen för linjelaserstyrd motor kan läras av följande stycken:
Designmål
Herr. Rafal: Jag är väldigt ny på det här. Jag har undersökt de senaste veckorna och har inte hittat exakt vad jag behöver.
Jag kommer att vara tacksam för all hjälp. Jag bifogar ett foto av min idé. Jag vill styra två 12 V DC-motorer med lasernivå.
Linjelasernivån kommer att signalera mottagarna.

Denna signal måste då styra 12 V DC-motorns riktning. Motorn roterar gängstången fram och tillbaka för att justera verktygets höjd.
Från vad jag upptäckte skulle det finnas flera fotodioder anslutna parallellt, en uppsättning för att detektera lasern över nollnivån och den andra under den nivån. Nollnivån är bara någon form av paus mellan fotodioderna för att förhindra att systemet vaknar. Lasersensor utan display. Jag gav bara ett bildfoto.
Jag behöver en H-bryggkrets, men allt som jag hittat ska användas med ett Arduino-system. Vid behov kan jag köpa en färdig brygga till ett rimligt pris på upp till $ 30
Helst skulle detta fungera med både röda och gröna lasrar, men våglängderna är så olika att jag tvivlar på att det skulle kunna göras och att det inte skulle fungera över hela ljusspektret.
Inledningsvis skulle jag vilja ställa in nivån på den här strålen som är fäst på motorerna med uppåt- och nedåtknapparna. Jag skulle vara glad om den andra motorn sedan skulle planera sig med gyroskopet medan den ställdes upp, men utan Arduino kan det vara väldigt svårt.
Jag känner att det jag försöker göra är så enkelt att jag kan komma undan utan att använda Arduino. Och jag insisterar på en analog på grund av de svåra förhållandena på en byggarbetsplats och det verkar för mig att ju mer elektronik, desto mer opålitlig är enheten.
Det fungerar bara inomhus och laseravståndet är max 10m. Motorn jag hittade i början har en stor strömförbrukning på 200mA max 2,19 A, men också ett stort vridmoment.
Strömförsörjer 18 V DC från ett Makita-batteri.
Tack på förhand för eventuella förslag.
Hälsningar från Polen
Rafal
Bylte : Jag har en förvirring om hur motoraxlarna fungerar. Den gängade skruven på båda motorerna kommer att skjuta verktyget, men kan det inte dra tillbaka det? Hur fungerar det?
Är det möjligt att implementera detsamma med en enda motor?
Herr. Rafal: Nedre utjämningsrader skulle kanske vara 70 cm, endast för små rum, t.ex. en toalett så att du kan komma in genom en dörr.
Maskin utan drivning, handdragen, endast utjämningsrader. I videon är de två gula föremålen på master laserdetektorer som är fast fästa vid rakarna.
Lasern står någonstans längre bort och ger en horisontell linje.
Motorerna skulle fästas på en vagn och den gängade skruven för att utjämna rätar med laserdetektorer. Det måste finnas två motorer för att jämna ut båda sidor, men det är en spegelbild.
Den enda vanliga delen skulle vara en tvåkanalig H-bro som om jag gjorde det från en färdig modul och eventuellt ett gyroskop, men det är en dröm :).
Det är viktigt att det finns en knapp för vänster och höger motorvarv.
Förfarandet är detta. Jag hänger lasern till exempel 2 m över den angivna golvnivån. Jag mäter 2 meter från laserstrålen till rätkanten.
Jag reglerar höjden genom att trycka på knapparna för att växla höger-vänster så att den är lika med 2 meter till rektangelns nederkant. Jag satte detektorerna på masten så att laserstrålen är på nollnivå mellan fotodiodavsnitten. Och resten kommer att göra sig själv
I bilagan satte jag en ritning av detektoroperationen.
Rafal
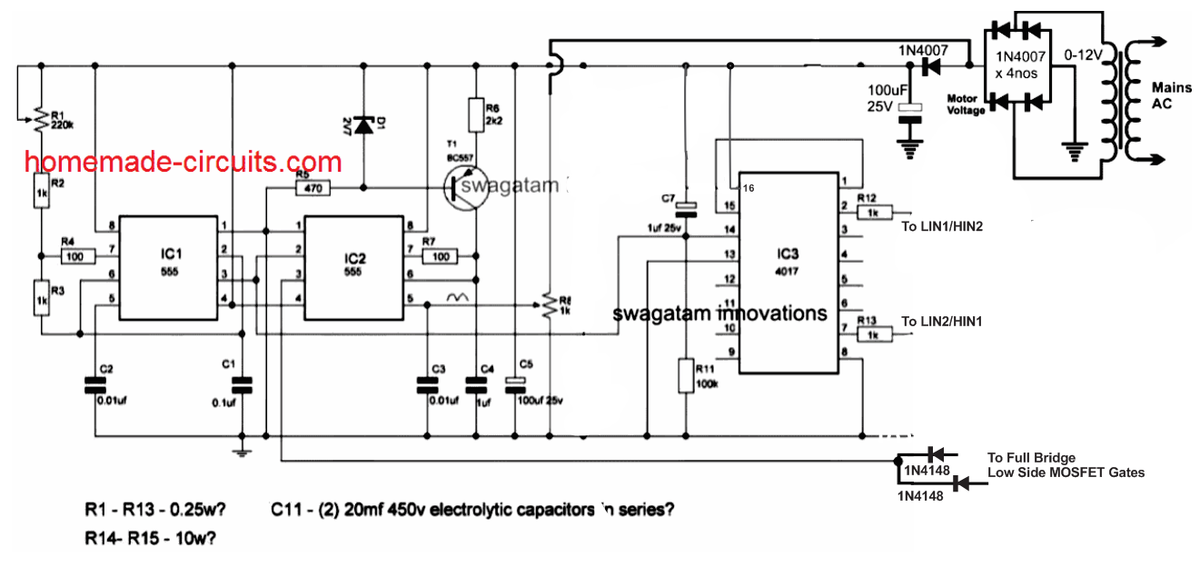
Kretsdesign

Med tanke på figuren ovan krävs två sådana identiska kretssteg för att detektera och korrigera det associerade motorstyrda verktyget med avseende på laserlinjens rakhetsnoggrannhet.
De två identiska stadierna är spegelbilder av varandra enligt nedan:

Kretsarna är ganska enkla. Det fungerar med en fönsterjämförare som säkerställer att drivmotorerna inte fungerar så länge paret LDR exponeras med samma laserlinjens ljusstyrka.
En halv matningsspänning genereras sedan på den icke-inverterande ingången till A1 och till den inverterande ingången på A2.
Så snart en avböjning i laserlinjen detekteras (vilket kan hända om det motorstyrda verktyget inte är inriktat rakt) ändras ljusstyrkan som påverkar LDR: erna R1 och R2.
I denna situation förskjuts ingångsspänningen till fönsterkomparatorn från hälften av matningsspänningen. Denna situation får komparatorutgången att beordra motorbrygganätet att förflytta motorn medurs eller moturs.
Transistorer T1. . . T4 är konfigurerade som ett bryggnätverk för att möjliggöra omkoppling av motorn framåt och bakåt beroende på LDR-belysning eller laserlinjeavvikelsevinkel.
Dioder D1. . . D4 är positionerade för att avbryta spänningstoppar som genereras under den tid motorn är aktiv och igång. Funktionen för de förinställda potentiometrarna P1 och P2 är för att underlätta justeringar av justeringen.
Dessa är finjusterade för att säkerställa att motorn är helt avstängd och inaktiv så länge det aktuella LDR-paret utsätts för exakt samma ljusljusstyrka.
Låt oss säga till exempel, på grund av felaktig inriktning av det motorstyrda verktyget, orsakar laserlinjelutningen att ljuset minskar på LDR R2 än LDR R1. Detta kommer att leda till att spänningen vid punkt A ökar över hälften av matningsspänningen.
I denna situation blir A1-förstärkarens utgång hög, vilket tvingar transistorerna T1 och T4 att fungera. Detta får i sin tur motorn att rotera i relevant riktning. Denna åtgärd flyttar automatiskt det anslutna verktyget i en rak linje tills dess horisontella justeringsnoggrannhet sammanfaller med laserlinjens noggrannhet.
Omvänt, om vi antar att verktyget ska lutas med motsatt orientering så att belysning av LDR är motsatt det som diskuterats ovan, orsakar spänningen vid punkt A att sjunka under halva matningsspänningen. Detta tillstånd utlöser A2-förstärkaren för utgången så att T3 och T2 blir i drift.
Detta resulterar i att motorn nu kör i motsatt riktning, i ett försök att korrigera inriktningen av verktyget i den aktuella riktningen tills den blir helt rak sammanfaller med laserlinjens horisontella noggrannhet.
Upp / Ner-knapp
Upp-ned-knapparna för att initialt förinställa vattenpassets höjd kan enkelt implementeras genom att koppla in tryckknappsbrytare parallellt med var och en av LDR-enheterna.
LDR-installation
För att få rätt svar från LDR måste de vänstra högra paren installeras inuti ett rörliknande hölje så att de bara kan 'se' laserbelysningen och inte något annat omgivande ljus.
Idén kan bevittnas i följande bild:

Här kan vi se att LDR: erna är placerade mycket nära varandra, vilket säkerställer att när laserlinjen är i exakt centrum, blir en del av de båda LDR-paren upplyst av laserljuset enhetligt.
Framsidan av LDR-höljet kan täckas med en diffus lins, så att laserbelysningen kan diffunderas inuti över respektive LDR-enheter enhetligt.
Tidigare: Enkel stöldskyddslarmkrets för att skydda värdefulla föremål Nästa: Universal BJT, JFET, MOSFET Tester Circuit