Den presenterade 3-fas VFD-kretsen ( designad av mig ) kan användas för att styra hastigheten för valfri trefasad borstad växelströmsmotor eller till och med en borstlös växelströmsmotor. Idén begärdes av Tom
Använda VFD
Den föreslagna 3-fas VFD-kretsen kan användas universellt för de flesta 3-fas växelströmsmotorer där regleringseffektiviteten inte är för kritisk.
Den kan användas specifikt för styrning ekorre bur induktion motorhastighet med ett öppet loopläge, och möjligen också i det slutna loopläget som kommer att diskuteras i den senare delen av artikeln.
Moduler krävs för trefasinverterare
För utformning av den föreslagna 3-fas VFD- eller variabla frekvensomriktarkretsen krävs i huvudsak följande grundläggande kretssteg:
- PWM-krets för spänningsregulator
- 3-fas hög sida / låg sida H-bryggkrets
- 3 Fasgeneratorkrets
- Spänning till frekvensomvandlarkrets för att generera V / Hz-parameter.
Låt oss lära oss funktionsdetaljerna i ovanstående steg med hjälp av följande förklaring:
En enkel PWM-spänningskontrollkrets kan ses i diagrammet nedan:

PWM-styrenheten
Jag har redan införlivat och förklarat funktionen av ovanstående PWM-generatorsteg som i grunden är utformat för att generera en varierande PWM-utgång över pin3 i IC2 som svar på potentialen som appliceras på pin5 i samma IC.
1K-förinställningen som visas i diagrammet är RMS-kontrollreglaget, som kan justeras på lämpligt sätt för att erhålla den önskade proportionella mängden utspänning i form av PWM vid pin3 i IC2 för vidare bearbetning. Detta är inställt för att producera en motsvarande utgång som kan motsvara elnätet 220V eller 120V AC RMS.
H-Bridge Driver Circuit
Nästa diagram nedan visar en enkelkrets H-bridge 3-fas drivkrets med IC IRS2330.
Designen ser okomplicerad ut eftersom de flesta komplexiteten hanteras av de inbyggda chipsens sofistikerade kretsar.
En välberäknad 3-fassignal appliceras över HIN1 / 2/3 och LIN1 / 2/3-ingångarna på IC via ett 3-fas signalgeneratorsteg.
Utgångarna från IC IRS2330 kan ses integrerad med 6 mosfetter eller IGBT-bryggnätverk, vars avlopp är korrekt konfigurerade med motorn som behöver kontrolleras.
Mosfet / IGBT-grindarna på lågsidan är integrerade med IC2-stift nr 3 i det ovan diskuterade PWM-generatorkretssteget för att initiera PWM-injektionen i bron-mosfetsteget. Denna reglering hjälper i slutändan motorn att uppnå önskad hastighet enligt inställningarna (via 1 k förinställning i det första diagrammet).

I följande diagram visualiserar vi erforderlig 3-fas signalgeneratorkrets.

Konfigurera kretsen för 3-fasgeneratorer
3-fasgeneratorn är konstruerad kring ett par CMOS-chips CD4035 och CD4009 som genererar exakt dimensionerade 3-fas signaler över de visade pinouts.
Frekvensen för de tre fassignalerna beror på de matade ingångsklockorna som ska vara 6 gånger den avsedda 3-fassignalen. Betydelse, om den erforderliga 3-fasfrekvensen är 50 Hz, bör ingångsklockan vara 50 x 6 = 300 Hz.
Det antyder också att de ovanstående klockorna kan varieras för att variera den effektiva frekvensen hos förarens IC, som i sin tur skulle vara ansvarig för att variera motorns driftsfrekvens.
Eftersom ovannämnda frekvensändring måste ske automatiskt som svar på den varierande spänningen blir en spänning till frekvensomvandlare väsentlig. Nästa steg diskuterar en enkel noggrann spänning till frekvensomvandlarkrets för den nödvändiga implementeringen.
Hur man skapar ett konstant V / F-förhållande
Vanligtvis i induktionsmotorer, för att bibehålla en optimal effektivitet av motorhastigheten och token, måste glidhastigheten eller rotorhastigheten kontrolleras, vilket i sin tur blir möjligt genom att upprätthålla ett konstant V / Hz-förhållande. Eftersom statormagnetflödet alltid är konstant oavsett ingångsfrekvensen blir rotorhastigheten lätt styrbar med bibehållande av V / Hz-förhållandet konstant .
I ett öppet loopläge kan detta göras ungefär genom att bibehålla förutbestämda V / Hz-förhållanden och implementera det manuellt. Till exempel i det första diagrammet kan detta göras genom att justera R1 och 1K-förinställningen på lämpligt sätt. R1 bestämmer frekvensen och 1K justerar RMS för utgången, därför genom att på lämpligt sätt justera de två parametrarna kan vi manövrera den erforderliga mängden V / Hz.
För att få en relativt noggrann kontroll av ett induktionsmotormoment och -hastighet måste vi implementera en sluten slingstrategi, där glidhastighetsdata måste matas till processorkretsen för en automatisk justering av V / Hz-förhållandet så att detta värdet förblir nästan ungefär konstant.
Implementering av feedback från Closed Loop
Det första diagrammet på denna sida kan ändras på lämpligt sätt för att utforma den automatiska V / Hz-regleringen med sluten slinga enligt nedan:

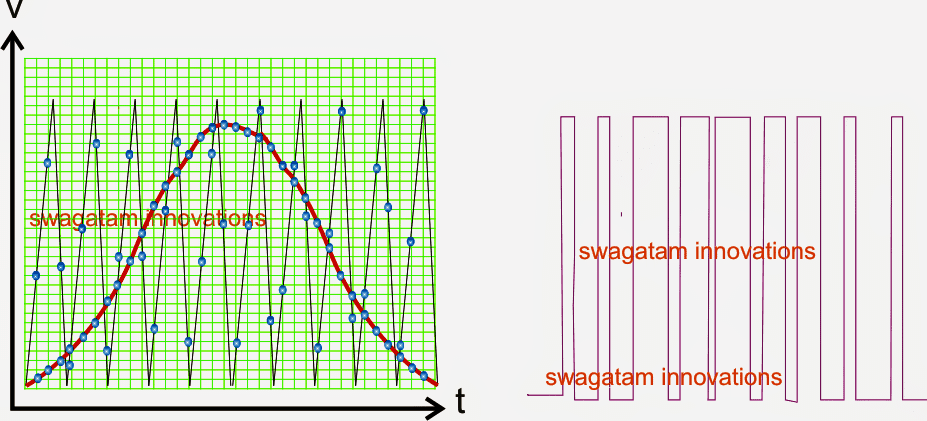
I figuren ovan bestämmer potentialen vid stift nr 5 i IC2 bredden på SPWM som alstras vid stift nr 3 på samma IC. SPWM genereras genom att jämföra 12V-rippelprovet vid stift nr 5 med triangelvåg vid stift nr 7 i IC2, och detta matas till lågsidesmusklerna för motorstyrningen.
Ursprungligen är denna SPWM inställd på någon justerad nivå (med 1K perset) som utlöser IGBT-grindarna på lågsidan av 3-fasbryggan för att initiera rotorrörelsen vid den angivna nominella hastighetsnivån.
Så snart rotorrotorn börjar rotera, orsakar den anslutna varvräknaren med rotormekanismen en proportionell ytterligare mängd spänning att utvecklas vid stift nr 5 av IC2, detta orsakar proportionellt att SPWM: erna blir bredare vilket orsakar mer spänning till motorns statorspiraler. Detta orsakar ytterligare ökning av rotorhastigheten och orsakar mer spänning vid stift nr 5 i IC2, och detta fortsätter tills SPWM-ekvivalentspänningen inte längre kan öka och statorrotorsynkroniseringen uppnår ett stabilt tillstånd.
Ovanstående procedur fortsätter med självjustering under motorns driftperioder.
Hur man gör och integrerar varvräknaren
En enkel varvräknardesign kan ses i följande diagram, detta kan integreras med rotormekanismen så att rotationsfrekvensen kan mata basen på BC547.

Här samlas rotorhastighetsdata från en hall-effekt-sensor eller ett IR-LED / sensornätverk och matas till basen av T1.
T1 svänger vid denna frekvens och aktiverar varvräknarkretsen genom att konfigurera en monostabil krets IC 555 på lämpligt sätt.
Utsignalen från ovanstående varvräknare varierar proportionellt som svar på ingångsfrekvensen vid basen av T1.
När frekvensen ökar stiger också D3-utgången vid den yttersta högra sidan och vice versa och hjälper till att hålla V / Hz-förhållandet till en relativt konstant nivå.
Hur man kontrollerar hastighet
Motorns hastighet med konstant V / F kan uppnås genom att ändra frekvensingången vid klockingången hos IC 4035. Detta kan uppnås genom att mata en variabel frekvens från en IC 555-astabel krets eller vilken som helst standard-astabel krets till klockingången på IC 4035.
Ändring av frekvens ändrar effektivt motorns driftsfrekvens, vilket på motsvarande sätt sänker glidhastigheten.
Detta detekteras av varvräknaren och varvräknaren minskar proportionellt potentialen vid stift nr 5 på IC2, vilket i sin tur minskar SPWM-innehållet på motorn proportionellt, och följaktligen minskas spänningen för motorn, vilket säkerställer motorhastighetsvariation med rätt erforderligt V / F-förhållande.
En hemlagad V till F-omvandlare

I ovannämnda krets för spänning till frekvensomvandlare används en IC 4060 och dess frekvensberoende motstånd påverkas genom en LED / LDR-enhet för de avsedda omvandlingarna.
LED / LDR-enheten är förseglad inuti en ljussäker låda och LDR är placerad över ett 1 M frekvensberoende motstånd på IC.
Eftersom LDR / LDR-svaret är ganska linjärt genererar den varierande belysningen av lysdioden på LDR en proportionellt varierande (ökande eller minskande) frekvens över pin3 på IC.
FSD- eller V / Hz-intervallet för scenen kan ställas in genom att korrekt ställa in 1M-motståndet eller till och med C1-värdet.
Lysdioden är spänning härleds och belyses genom PWM: erna från det första PWM-kretssteget. Det innebär att eftersom PWM: erna varierar, kommer LED-belysningen också att variera vilket i sin tur skulle ge upphov till en proportionellt ökande eller minskande frekvens vid pin3 i IC 4060 i ovanstående diagram.
Integrera omvandlaren med VFD
Denna varierande frekvens från IC 4060 behöver nu helt enkelt integreras med 3-fasgeneratorn IC CD4035 klockingång.
Ovanstående steg utgör huvudingredienserna för att skapa en 3-fas VFD-krets.
Nu skulle det vara viktigt att diskutera angående DC BUS som krävs för leverans av IGBT-motorstyrenheter och inställningsprocedurer för hela konstruktionen.
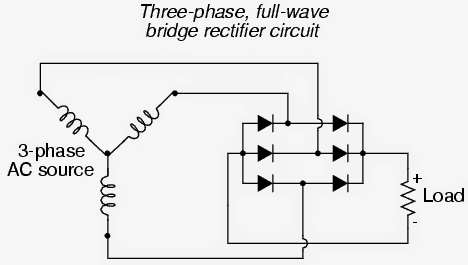
DC BUS som appliceras över IGBT H-bridge-skenorna kan erhållas genom att korrigera den tillgängliga 3-fas nätingången med följande kretskonfiguration. IGBT DC BUS-skenorna är anslutna över de punkter som anges som 'belastning'

För en enfas källa kan rättelsen implementeras med användning av standard 4-diodbrygganätverk.
Hur man ställer in den föreslagna 3-fas VFD-kretsen
Det kan göras enligt följande instruktioner:
Efter att DC-busspänningen har applicerats över IGBT: erna (utan att motorn är ansluten) justerar du PWM 1k-förinställningen tills spänningen över skenorna blir lika med de avsedda motorspänningsspecifikationerna.
Justera sedan IC 4060 1M-förinställningen för att justera någon av IC IRS2330-ingångarna till önskad korrekt frekvensnivå enligt givna motorspecifikationer.
Efter att ovanstående procedurer har slutförts kan den angivna motorn anslutas och levereras med olika spänningsnivåer, V / Hz-parameter och bekräftas för en automatisk V / Hz-operation över den anslutna motorn.
Tidigare: Hur man bygger en Grow Light Circuit Nästa: Mjukgörare krets utforskad